
Info from today's video meeting.
======
20241212 ROS Lawn Tractor Automation meeting - Length 14:49 This video: https://youtu.be/8ePN19kc1uY
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
Index: 00:00 Jeff: Points out links to meeting video index in description below. Comments about Slack channel backups. And the degradation of Slack usability... But we are attempting to preserve/archive Slack messages. 01:55 Al: Shows an addressable (1-wire) RGB LED. 03:05 Al: Is building a new remote control. Easy EDA layout software. 09:05 Al: Comments about his NAS drive. 09:30 Jeff: Thoughts on using the Slack archive and the HTML Lawn Tractor index and the YouTube channel index together.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt


I was able to get the MPJA PL9823 RGB LEDs to work with the Teensy. I thought they would be drop-in equivalent, but they were not. They are 'NEO*RGB*' instead of 'NEOGRB'! Sample code attached to drive 3 LEDs at different rates. I also came across the Teensy specific time tracking function, 'elapsedMillis timeLED0;' which is new to me and elegant.
```#include
define LED_PIN 2
define NUM_LEDS 3
// Color table structure struct Color { const char** name; uint8t r; uint8t g; uint8_t b; };
// Define color table const Color COLORS[] = { {"Red", 128, 0, 0}, {"Yellow", 128, 128, 0}, {"Golden", 128, 96, 0}, {"Orange", 128, 64, 0}, {"Dark Orange", 128, 32, 0}, {"Green", 0, 128, 0}, {"Blue", 0, 0, 128}, {"White", 128, 128, 128} };
const int NUM_COLORS = sizeof(COLORS) / sizeof(Color);
// Initialize strip with RGB order AdafruitNeoPixel strip = AdafruitNeoPixel(NUMLEDS, LEDPIN, NEORGB + NEOKHZ800);
// Timing variables elapsedMillis timeLED0; elapsedMillis timeLED1; elapsedMillis timeLED2; int colorIndex0 = 0; int colorIndex1 = 0; int colorIndex2 = 0;
void updateLED0() { if (timeLED0 >= 2000) { // 2 seconds const Color& color = COLORS[colorIndex0]; strip.setPixelColor(0, color.r, color.g, color.b); Serial.print("LED 0 color: "); Serial.println(color.name);
colorIndex0 = (colorIndex0 + 1) % NUM_COLORS;
timeLED0 = 0;
strip.show();
}
}
void updateLED1() { if (timeLED1 >= 4000) { // 4 seconds const Color& color = COLORS[colorIndex1]; strip.setPixelColor(1, color.r, color.g, color.b); Serial.print("LED 1 color: "); Serial.println(color.name);
colorIndex1 = (colorIndex1 + 1) % NUM_COLORS;
timeLED1 = 0;
strip.show();
}
}
void updateLED2() { if (timeLED2 >= 6000) { // 6 seconds const Color& color = COLORS[colorIndex2]; strip.setPixelColor(2, color.r, color.g, color.b); Serial.print("LED 2 color: "); Serial.println(color.name);
colorIndex2 = (colorIndex2 + 1) % NUM_COLORS;
timeLED2 = 0;
strip.show();
}
}
void setup() { Serial.begin(9600); delay(1000); Serial.println("\nTriple LED Independent Timing Test");
// Print color table
Serial.println("\nColor Table:");
Serial.println("Name R G B");
Serial.println("------------------------");
for (int i = 0; i < NUM_COLORS; i++) {
Serial.printf("%-12s %3d %3d %3d\n",
COLORS[i].name, COLORS[i].r, COLORS[i].g, COLORS[i].b);
}
Serial.println();
strip.begin();
strip.setBrightness(128); // 50% brightness
strip.show();
// Initialize timing variables
timeLED0 = 0;
timeLED1 = 0;
timeLED2 = 0;
}
void loop() { updateLED0(); // Check and update LED0 every 2 seconds updateLED1(); // Check and update LED1 every 4 seconds updateLED2(); // Check and update LED2 every 6 seconds }```

In order to get a new backup of Slack, Al and I spent time last Thursday morning downloading and converting the Slack data. In order to get the "forbidden" messages I turned on the "Free Trial" option. So that is active for the next 27 days if anyone wants to play with the extra features.
But... I decided to scroll back through the old messages. I noticed that if I clicked on a thread, that when I closed the thread that the main page had lost track of its position. It would jump backwards about a month. So I had to scroll forward and try to regain my position. That got old real quick... And this was on the REAL Slack software.
I finally got fed up and decided to upload the new backups and tried to organize it. I think I have it working.
As an example here is the old backup and the new backup for the Random channel.
http://sampson-jeff.com/RosAgriculture/slack_exports/20240402-20241212/Slack%20Export%20-%20%23random.html Second part
I'll have to try to figure out how to document this.
Very nice. Worked for me just fine. Thank you for taking the time to pull this together.
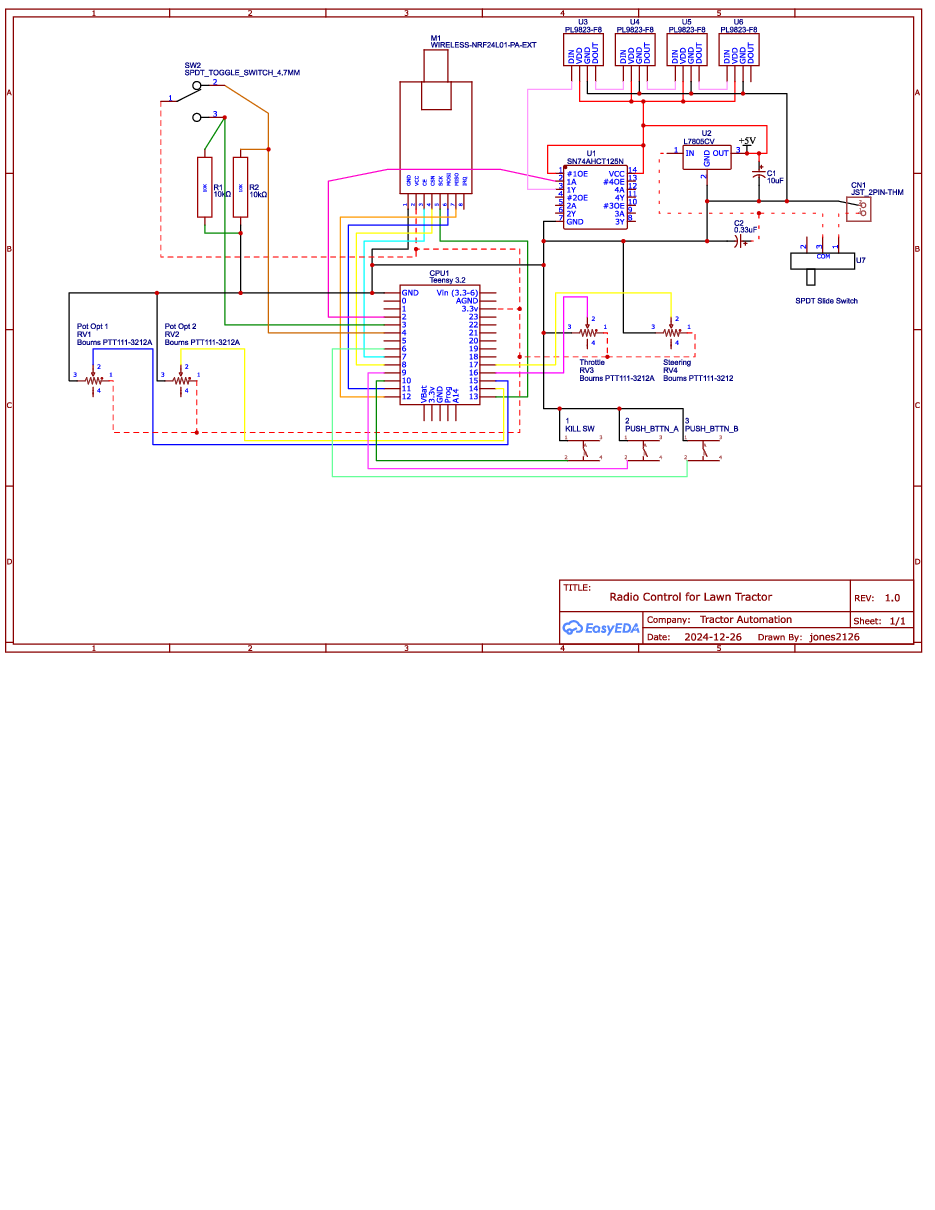
Code used for testing the integration of: Teensy, NRF24 radio, level shifter for 5V -> 3.3V, PL9823 RGB LEDs, and SPDT on/off/on toggle switch. I won't use it in production, but it is helping make sure my pin assignments are good for my radio control PCB board that I have underway and offers a basic loop and timing structure. https://gist.github.com/jones2126/53447a2062fec87c4d61bd1754ce6c8e
Here is a clever idea to raise up your lawn tractor. https://www.youtube.com/watch?v=ddH7c7_o2Tc


Thanks @JeffS after we move in in March I definitely going to make a couple of those!
They use a Teensy 3.2 to fire a laser at moving targets! Cool. https://www.youtube.com/watch?v=IrocytwdeEY

Getting closer to ordering a PCB for the 2nd iteration of my radio control.
@JeffS Thanks for the tip. No external resistors needed connecting the center pin to GND and the signal pins to 3 and 4. I'm not sure what my issue was earlier.
```const int leftPin = 3; // Left position of switch const int rightPin = 4; // Right position of switch
void setup() { pinMode(leftPin, INPUTPULLUP); pinMode(rightPin, INPUTPULLUP); Serial.begin(9600); }
void loop() { int leftState = digitalRead(leftPin); int rightState = digitalRead(rightPin); if (leftState == LOW) { Serial.println("Switch is in LEFT position"); } else if (rightState == LOW) { Serial.println("Switch is in RIGHT position"); } else { Serial.println("Switch is in CENTER position"); } delay(100); }```

Info from today's video meeting.
======
20241226 ROS Lawn Tractor Automation meeting - Length 30:11 This video: https://youtu.be/ritUWJ4b6kE
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
Index: 00:00 Jeff: Points out links to meeting video index in description below. 01:10 Al: Talks about his new remote control design. Teensy 3.2, NRF24 radio, switches, pots, LEDs. 02:30 Al: Addressable RGB LEDs for status display. 03:35 Jeff: Mentions sourcing and functionality of the addressable RGB LEDs. 05:05 Al: More on implementing his LEDs. 06:00 Al: The Teensy "millis" function. More discussion of the LED implementation. 07:20 Al: More details about switches and pots and code for the remote control. 09:50 Al: Schematic of new design. Created with EasyEDA. A random tour of the project. 13:10 Jeff: Offers suggestions on wiring switches. 17:40 Back to discussion of design. 18:40 Al: Comments about pros and cons of EasyEDA. 19:10 Jeff: Suggests adding patterns for alternate parts. I.e., NRF24 radio vs. LORA radio. And adding extra pads on the unused pins. More comments about manufacturability.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

fun to watch...radio control flail mower https://www.youtube.com/watch?v=pKGCYjIyBqA

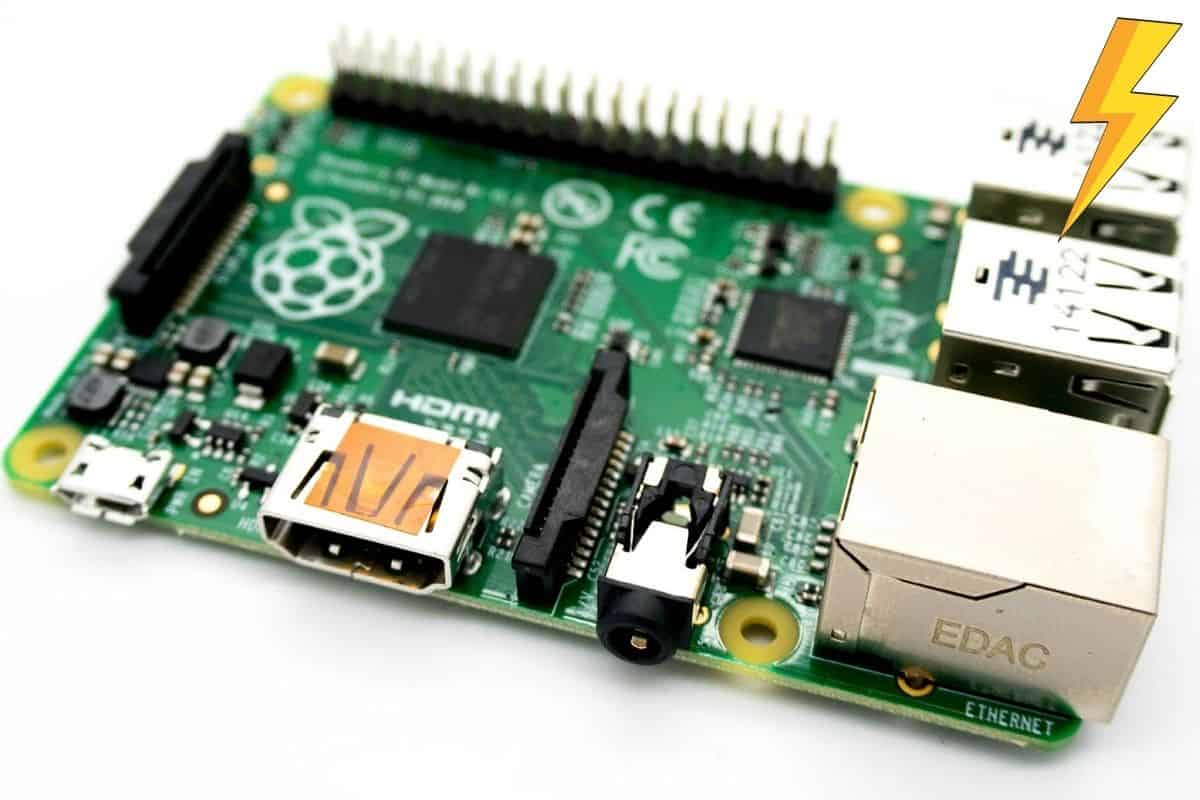
Finally got around to installing ROS2 jazzy on an RPi5 under Ubuntu 24.04.
I followed the instructions from Automatic Addison: https://automaticaddison.com/how-to-install-ros-2-jazzy/
btw, Ubuntu 24.10 throws errors, so I would avoid making that mistake.

*Thread Reply:* @Al Jones Finally found my windows lap top. So I want to download Ubuntu 24.04. and ROS 2. on my Pi5. Are you using the lite or desktop version? Any advise?
I’d like to parallel some of your development. When we move in March I’ll get the Barbie Jeep going and then transition to a customized battery powered push mower. Our temporary living space is very limited so now I’m working off a folding table top surface to develop the electronics and bench testing.
*Thread Reply:* I use the desktop version because I find it easier to use LibreOffice when I need to have tools available to document stuff. btw, I use a 64GB SD card for storage and then clone the SD card to another SD card as a backup.

*Thread Reply:* Thanks Al! I think that’s the one I put on a micro card. Next is powering the pi5. More battery research.
@Al Jones Is your Pi5 running on wall wort or battery? What plans do you have for it? Any plans to use containers? Btw I’ve been reading and re reading 3 links;
https://github.com/lucasmazzetto/differentialdriverobot
https://pages.github.berkeley.edu/EECS-106/sp22-site/assets/lab/2022_C106BLab_0.pdf
https://docs.ros.org/en/jazzy/Tutorials/Beginner-CLI-Tools/Configuring-ROS2-Environment.html
Just wondering if it lives up to the hype from ROS.ORG?
*Thread Reply:* 1. For desktop use I have a wall wort that has a rated output of 27 watts. I intend to use the RPi 5 on my tractor so I will have to get a buck converter with similar 12V to 5V output. I have not bought one, but this one looks interesting. https://www.pololu.com/product/4091
- This 'https://pages.github.berkeley.edu/EECS-106/sp22-site/assets/lab/2022__C106B_Lab_0.pdf' looks like ROS1 vs. ROS2. I like the idea of getting TurtleSim to work, but based on the launch command it looks like ROS1. ROS2 would be something like 'ros2 launch turtlesim turtlesimmimiclaunch.py'.
- The 'jazzy' tutorial link is definitely ROS2.


*Thread Reply:* I really like that 5v unit. No messing with pots. Also like the 9v. Thanks for the info Al
*Thread Reply:* Here is a general article on powering Raspberry Pi. I have seen other articles about powering through GPIO pins vs, the official USB connector. I will look some more. https://raspberrytips.com/how-to-power-a-raspberry-pi/
*Thread Reply:* Here is a random post. It says it is only good to 3.5A @ 5V. (Maybe that fact was from the Amazon comment) https://groups.google.com/g/hbrobotics/c/ft17P7Xz8no Be careful of the new USB-C PD interface. You could blow stuff up real quick.
Here is another random article. https://minipctech.com/power-your-raspberry-pi/

*Thread Reply:* And just in general if you search for this "power raspberry pi via gpio" you get lots of questions/discussions/answers.
*Thread Reply:* And more specifically for the PI5 you can search "power raspberry pi 5 via gpio" to get a more narrow view. That avoids all of the people trying to sell you wall warts.
*Thread Reply:* @Bob Hassett says "I’m thinking of attaching to the GPIO 5v pin". You may want to read through some of those references to find out the pros and cons of using the GPIO pins before you randomly start connecting things.
*Thread Reply:* I’ve started reading thanks. So far one guy says don’t use GPIO. More reading needed.
Working on my wiring for the Teensy 4.1 and my Adafruit BNO085 IMU. Using I2C seemed to work, but then I came across a warning about the RT1011 chip. Now trying to map the SPI1 since SPI0 is intended to be used by NRF24 radio. Just mentioning it here fyi. All these wires!!





*Thread Reply:* Better ```#include <Adafruit_BNO08x.h>
include <SPI.h>
// Define the Chip Select, Interrupt, and Reset pins for SPI
define BNO08X_CS 9 // Chip Select pin
define BNO08X_INT 4 // Interrupt pin
define BNO08X_RESET 5 // Reset pin
AdafruitBNO08x bno08x(BNO08XRESET);
void setup() { Serial.begin(115200); while (!Serial); // Wait for the serial monitor to open
// Try to initialize the BNO08x using SPI if (!bno08x.beginSPI(BNO08XCS, BNO08X_INT, &SPI1)) { Serial.println("Failed to find BNO08x chip"); while (1) { delay(10); } } Serial.println("BNO08x Found!");
// Additional setup can go here }
void loop() { // Periodic checks or sensor reading code can go here }```

*Thread Reply:* For reference, this is the example from the Adafruit library adjusted to use SPI1 with my wiring to print yaw, pitch and roll.
```#include <Adafruit_BNO08x.h>
include <SPI.h>
// SPI Pin Definitions
define BNO08X_CS 9 // Chip Select pin for BNO08x on SPI
define BNO08X_INT 4 // Interrupt pin
define BNO08X_RESET 5 // Reset pin, use -1 if not connected
// Declare the eulert structure to store yaw, pitch, and roll struct eulert { float yaw; float pitch; float roll; };
eulert ypr; // Global instance of eulert to store sensor output
// Create an instance of the BNO08x AdafruitBNO08x bno08x(BNO08XRESET);
void setup() { Serial.begin(115200); while (!Serial); // Wait for the serial monitor to open
// Initialize the sensor over SPI if (!bno08x.beginSPI(BNO08XCS, BNO08X_INT, &SPI1)) { Serial.println("Failed to find BNO08x chip"); while (1) { delay(10); } } Serial.println("BNO08x Found!");
// Enable the specific report here, e.g., SH2ARVRSTABILIZEDRV bno08x.enableReport(SH2ARVRSTABILIZEDRV); }
void quaternionToEuler(float qr, float qi, float qj, float qk, euler_t** ypr, bool degrees = false) { float sqr = sq(qr); float sqi = sq(qi); float sqj = sq(qj); float sqk = sq(qk);
ypr->yaw = atan2(2.0 * (qi * qj + qk * qr), (sqi - sqj - sqk + sqr)); ypr->pitch = asin(-2.0 * (qi * qk - qj * qr) / (sqi + sqj + sqk + sqr)); ypr->roll = atan2(2.0 * (qj * qk + qi ** qr), (-sqi - sqj + sqk + sqr));
if (degrees) { ypr->yaw *= RAD_TO_DEG; ypr->pitch *= RADTODEG; ypr->roll **= RADTODEG; } }
void loop() { sh2SensorValuet sensorValue; if (bno08x.getSensorEvent(&sensorValue)) { if (sensorValue.sensorId == SH2ARVRSTABILIZED_RV) { quaternionToEuler(sensorValue.un.rotationVector.real, sensorValue.un.rotationVector.i, sensorValue.un.rotationVector.j, sensorValue.un.rotationVector.k, &ypr, true); // Print out the Euler angles Serial.print("Yaw: "); Serial.print(ypr.yaw); Serial.print(" Pitch: "); Serial.print(ypr.pitch); Serial.print(" Roll: "); Serial.println(ypr.roll); } } }```
*Thread Reply:* Again, for reference. This code calculates yaw using the 'report' or record type 'SH2ROTATIONVECTOR'.
@JeffS You asked if using the SPI required different interaction for data acquisition, I would say at this point, no. Getting data off the IMU is the same between I2C and SPI.
```#include <Adafruit_BNO08x.h>
include <SPI.h>
// SPI Pin Definitions
define BNO08X_CS 9 // Chip Select pin for BNO08x on SPI
define BNO08X_INT 4 // Interrupt pin
define BNO08X_RESET 5 // Reset pin, use -1 if not connected
// Create an instance of the BNO08x AdafruitBNO08x bno08x(BNO08XRESET);
unsigned long pubtimer; unsigned long pubinterval = 100; // publish interval in ms float yaw, pitch, roll; byte quatAccuracy = 0;
// Function declarations void quaternionToEuler(float qw, float qx, float qy, float qz, float* yaw, float* pitch, float** roll, bool degrees = false); void printAccuracyLevel(byte accuracyNumber);
void setup() { Serial.begin(115200); while (!Serial); // Wait for serial monitor to open
// Initialize the sensor over SPI if (!bno08x.beginSPI(BNO08XCS, BNO08X_INT, &SPI1)) { Serial.println("Failed to find BNO08x chip"); while (1) { delay(10); } } Serial.println("BNO08x Found!");
// Enable reports bno08x.enableReport(SH2ROTATIONVECTOR);
pub_timer = millis(); // Initialize timer for publication }
void loop() { sh2SensorValuet sensorValue; if (bno08x.getSensorEvent(&sensorValue)) { if (sensorValue.sensorId == SH2ROTATIONVECTOR) { // Extract quaternion components float qx = sensorValue.un.rotationVector.i; float qy = sensorValue.un.rotationVector.j; float qz = sensorValue.un.rotationVector.k; float qw = sensorValue.un.rotationVector.real; quatAccuracy = sensorValue.un.rotationVector.accuracy;
// Convert quaternion to Euler angles
quaternionToEuler(qw, qx, qy, qz, &yaw, &pitch, &roll, true);
// Check if it's time to publish the data
if (millis() - pub_timer >= pub_interval) {
pub_timer = millis();
printAccuracyLevel(quatAccuracy);
Serial.print(",");
Serial.print(yaw, 1);
Serial.print(",");
Serial.print(pitch, 1);
Serial.print(",");
Serial.println(roll, 1);
}
}
} }
// Helper function to convert quaternion to Euler angles void quaternionToEuler(float qw, float qx, float qy, float qz, float* yaw, float* pitch, float** roll, bool degrees) { float sqr = sq(qw); float sqi = sq(qx); float sqj = sq(qy); float sqk = sq(qz);
*yaw = atan2(2.0 * (qx * qy + qz * qw), (sqi - sqj - sqk + sqr)); *pitch = asin(-2.0 * (qx * qz - qy * qw) / (sqi + sqj + sqk + sqr)); *roll = atan2(2.0 * (qy * qz + qx * qw), (-sqi - sqj + sqk + sqr));
if (degrees) { *yaw *= RADTODEG; *pitch *= RADTODEG; *roll *= RADTODEG; } }
// Print the accuracy level of quaternion data void printAccuracyLevel(byte accuracyNumber) { Serial.print(accuracyNumber); }```
Found this thread about 12v and Pi. Looks like 2 possibilities? Use the usb 3 port or usb breakout mounted on a stepdown buck converter? Any opinions? https://forums.raspberrypi.com/viewtopic.php?t=365399
*Thread Reply:* When I get to that point I'm intending to use a 12V to 5V converter with a USB C cable with 18 AWG wiring which can handle the amperage.
*Thread Reply:* I’m thinking this adafruit usb c with 18 ga wire.https://www.adafruit.com/product/5180 . I just don’t know if I should worry about the power compliance stuff on the pi.
Info from today's video meeting.
======
20250102 ROS Lawn Tractor Automation meeting - Length 1:03:17 This video: https://youtu.be/8p7apz94TZ0
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
https://www.flashforge.com.hk/creator-3-pro.html https://www.amazon.com/FlashForge-Creator-Independent-Extruder-Printer/dp/B09R3BPW57 https://automaticaddison.com/how-to-install-ros-2-jazzy/ https://www.pololu.com/product/4091 https://raspberrytips.com/how-to-power-a-raspberry-pi/ https://minipctech.com/power-your-raspberry-pi/ Some sketchy assumptions made in the next one (in my opinion): https://www.hackster.io/simon-vavpotic/raspberry-pi-5-how-to-use-usb-c-to-share-power-rpi-via-gpio-e07c57 USB-C References: http://ww1.microchip.com/downloads/en/appnotes/00001953a.pdf https://www.usb.org/sites/default/files/D2T2-1%20-%20USB%20Power%20Delivery.pdf
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:35 Terry: Has a 3D printer on loan. He is making an impeller blade for a snow blower. 04:05 Terry: He is using the free version of OnShape CAD software. 08:00 Terry: He has a new First Robotics team to mentor. 11:10 Some discussion about 3D printers. 14:40 Terry: Next steps in his incremental design. 16:00 Al: Has installed Ubuntu 24.04 and ROS2 Jazzy on a Raspberry Pi 5. 19:25 Al: Says he is about to order the PCB for version 2 of his remote. (See last meeting) 27:10 We talk about power for a Raspberry Pi 5. 30:45 Al: Talks about his BNO085 IMU SPI connection. 38:20 More discussion about powering Raspberry Pi. 49:50 Al: Noticed that his RPi5 will actually run Gazebo. 55:55 Jeff: Wrap up...
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

I’ve decided to order the official wall wort first, for safety, until I do more research.
I was curious as how to monitor pi 5 power and temperature. Found this.https://forums.raspberrypi.com/viewtopic.php?t=367244
*Thread Reply:* More about pi 5 power management. https://forums.raspberrypi.com/viewtopic.php?t=358576&sid=b13b8a6c318df713143a944de947b330|https://forums.raspberrypi.com/viewtopic.php?t=358576&sid=b13b8a6c318df713143a944de947b330 So it might be able to more than 3 A by changing the software.
*Thread Reply:* @Bob Hassett I found the first post interesting. I didn't realize you can get both voltages and currents for all of the internal busses. It still seems you can't read the incoming voltage and current...
The second post (both pages) have a wealth of knowledge. It will still take re-reading and testing on a live system to figure it out But they mention configuration files ( to fake it out). And they give good descriptions of the negotiation process. And someone from Raspberry Pi says it is a standard implementation of USB-C PD.
But my first impression is that if you supply 5V/3A - and don;t load the crap out of your USB ports, it will probably work just fine. If you do have large USB loads, then add powered USB hubs like Al uses.
I will give it some more thought. I probably won't buy an RPi5 just to play...
*Thread Reply:* I ordered the official “wort” and usb c from Adafruit. Get it in about a week. When I’m ready I’ll go slow with the wort first while reading and rereading.
I found a link to a page that Bob just posted: https://www.raspberrypi.com/documentation/computers/raspberry-pi.html#schematics-and-mechanical-drawings It has partial schematics for older Pi boards, but not for Pi5.

@al When you get a chance, see if this command works on your Pi5 when it is running Ubuntu.
vcgencmd pmic_read_adc
*Thread Reply:* Works if I run with 'sudo'
al@RPi5NAS:~$ sudo vcgencmd pmicreadadc [sudo] password for al: 3V7WLSWA current(0)=0.08685777A 3V3SYSA current(1)=0.20104160A 1V8SYSA current(2)=0.27033260A DDRVDD2A current(3)=0.03025383A DDRVDDQA current(4)=0.00000000A 1V1SYSA current(5)=0.34255140A 0V8SWA current(6)=0.53090590A VDDCOREA current(7)=3.25052000A 3V3DACA current(17)=0.00000000A 3V3ADCA current(18)=0.00000000A 0V8AONA current(16)=0.00555555A HDMIA current(22)=0.01514040A 3V7WLSWV volt(8)=3.70720000V 3V3SYSV volt(9)=3.30260900V 1V8SYSV volt(10)=1.79877700V DDRVDD2V volt(11)=1.10439400V DDRVDDQV volt(12)=0.60109830V 1V1SYSV volt(13)=1.09963300V 0V8SWV volt(14)=0.79999920V VDDCOREV volt(15)=0.87059740V 3V3DACV volt(20)=3.30585700V 3V3ADCV volt(21)=3.30677300V 0V8AONV volt(19)=0.79941320V HDMIV volt(23)=5.04778000V EXT5VV volt(24)=5.05984000V BATTV volt(25)=0.00000000V al@RPi5NAS:~$
*Thread Reply:* It is good to know that particular command works under ubuntu since it seems to be key to this power stuff.
Try this and see what it says:
vcgencmd get_config usb_max_current_enable
Earlier I posted a page that has schematics. Turns out that is "THE" main documentation page for Raspberry Pi. So if you didn't know that page was there, here is a link to the entry point for that page: https://www.raspberrypi.com/documentation/computers/raspberry-pi.html
I think I better partition my Lenovo hard drive (C:). So windows in one volume. Linux 24.04 and ROS 2 in the other volume. Currently I have 42.2 GB free. So how much space do a need and still have room for windows stuff? How big is your Linux/ROS 2 stuff?
*Thread Reply:* IMO I would start with Ubuntu and ROS2 on your RPi. You might not need ROS on your laptop.
*Thread Reply:* Sounds good @Al Jones I’ll wait for the wort to show up.
Maybe I don’t need to? Just load up Linux and ROS 2 using Al’ experience example?
I just noticed that the USB connector that @Bob Hassett posted is a socket and not a plug. https://www.adafruit.com/product/5180 They do have a plug https://www.adafruit.com/product/5978 but read through the description to verify current, etc. And they say "Unlike USB Type C sockets, the plug side purposefully does not use both sets of D+/D-/CC pins:" So I am not sure how that applies.

Nice catch @JeffS ! Darn, guess I’ll have to cut up a charging cable.
A possibility? https://www.amazon.com/XMSJSIY-Transmission-Extension-Charging-18AWG-1-2M/dp/B0C1YXM9PF
That does look like it would work. And since they show what wires you get and specify wire size, then you are better off than cutting a random cable to see what you get. And using those keywords you have other options on length/price/wires... https://www.amazon.com/s?k=USB+Type+C+PD+Pigtail+Cable+Charge+Bare+Wire&i=industrial&crid=2R0R5BJHGPNT&sprefix=usb+type+c+pd+pigtail+cable+charge+bare+wire%2Cindustrial%2C159&ref=nbsbnoss|https://www.amazon.com/s?k=USB+Type+C+PD+Pigtail+Cable+Charge+Bare+Wire&i=industrial[…]tail+cable+charge+bare+wire%2Cindustrial%2C159&ref=nbsbnoss
PCB for radio controller arrived. Now I need to install parts to check fit and function.

*Thread Reply:* I like the PCB. I will need a new version because the solder pads for the LEDs and capacitors are too small for my hand soldering skills.



*Thread Reply:* Started on version 2 with wider pads to make soldering easier for me.

Did anybody else get this message? It just shows up on my Slack screen.
**Legacy workflows are no longer available.** This workflow is no longer available. You can build a new workflow in . Learn more.
I have no idea what a workflow is. Apparently whatever I had was deleted 3 months ago. But I'm going to assume I don't need it and just ignore it.
*Thread Reply:* I have not seen that message. No clue what it is about.
@Al Jones @Bob Hassett I have a Raspberry Pi 4 that is also powered by USB-C connector. I ordered the cables that Bob found: https://www.amazon.com/gp/product/B0C1YXM9PF?ref=ppx_pt2_dt_b_prod_image Then they suggested I look at a power supply: https://www.amazon.com/gp/product/B01NALDSJ0?ref=ppx_pt2_dt_b_prod_image&th=1 I ordered one of those also. They are supposed to show up tomorrow.
I also found out that there is at least two different versions of the Raspberry Pi 4. And they didn't bother to tell anybody. I can complain about that on the next video meeting.
My power supply showed up today. But they rescheduled my cables for Thursday.
I also noticed my HDMI cable was not in the box. Rather than waste a week of time looking for it I ordered a new one on Amazon.
I have widows eleven. I’ve read one can do Linux 24.04 and ROS 2 under wls. Opinions?
I am able to program my Teensy 4.1 which is connected to my RPi 5 using the Arduino IDE. Since the IDE is version 1.8.19 there are a few steps. For example:
- Install Arduino manually - do not use 'App Center'
- Download a copy of UDEV rules at: https://www.pjrc.com/teensy/00-teensy.rules
- cd ~/Downloads
- $ sudo cp 00-teensy.rules /etc/udev/rules.d/
- Get TeensyduinoInstall at: https://www.pjrc.com/teensy/td_download.html
- Download 'AARCH64' version for RPi5
- $ cd Downloads
- $ chmod +x TeensyduinoInstall.linuxaarch64
- $ ./TeensyduinoInstall.linuxaarch64 --dir=/home/al/arduino-1.8.19 ** adjust to your install for the home directory
- Open Arduino; set port and board. Teensy boards should be available
- Load and upload blink programs Now to try and get it to work with VSCode and PlatformIO 🤔

I followed this example https://www.hessmer.org/blog/2013/12/28/ibt-2-h-bridge-with-arduino/ to test the IBT-2 (aka BTS7960) motor controller. The spec indicates it can handle 43 amps momentarily. As I recall I have a 25 amp circuit breaker on my steering motor so this should be plenty. I used the same code as the example and an Uno for the test. Now I need to confirm what pins I would use on my Teensy 4.1.
```/** credit: https://www.hessmer.org/blog/2013/12/28/ibt-2-h-bridge-with-arduino/ IBT-2 Motor Control Board driven by Arduino.
Speed and direction controlled by a potentiometer attached to analog input 0. One side pin of the potentiometer (either one) to ground; the other side pin to +5V
Connection to the IBT-2 board: IBT-2 pin 1 (RPWM) to Arduino pin 5(PWM) IBT-2 pin 2 (LPWM) to Arduino pin 6(PWM) IBT-2 pins 3 (REN), 4 (LEN), 7 (VCC) to Arduino 5V pin IBT-2 pin 8 (GND) to Arduino GND IBT-2 pins 5 (RIS) and 6 (LIS) not connected **/
int SENSOR_PIN = 0; // center pin of the potentiometer
int RPWMOutput = 5; // Arduino PWM output pin 5; connect to IBT-2 pin 1 (RPWM) int LPWMOutput = 6; // Arduino PWM output pin 6; connect to IBT-2 pin 2 (LPWM)
void setup() { pinMode(RPWMOutput, OUTPUT); pinMode(LPWMOutput, OUTPUT); }
void loop() { int sensorValue = analogRead(SENSOR_PIN);
// sensor value is in the range 0 to 1023 // the lower half of it we use for reverse rotation; the upper half for forward rotation if (sensorValue < 512) { // reverse rotation int reversePWM = -(sensorValue - 511) / 2; analogWrite(LPWMOutput, 0); analogWrite(RPWMOutput, reversePWM); } else { // forward rotation int forwardPWM = (sensorValue - 512) / 2; analogWrite(RPWMOutput, 0); analogWrite(LPWMOutput, forwardPWM); } }```


Info from today's video meeting.
====== 20250109 ROS Lawn Tractor Automation meeting - Length 1:02:07 This video: https://youtu.be/2w602Gyawo0
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
A 5 amp USB-C cable from Amazon. https://www.amazon.com/gp/product/B0C1YXM9PF?ref=ppx_pt2_dt_b_prod_image A 5V/5A power convertor from Amazon. https://www.amazon.com/gp/product/B01NALDSJ0?ref=ppx_pt2_dt_b_prod_image&th=1 The voltage/current monitor command. https://forums.raspberrypi.com/viewtopic.php?t=367244 pi 4b won't boot and green led keep blinking fast https://forums.raspberrypi.com/viewtopic.php?t=324271 https://forums.raspberrypi.com/viewtopic.php?f=28&t=58151 This page has a chart that says Ubuntu 24.04 will run on either RPi4 or RPi5. https://ubuntu.com/download/raspberry-pi 32GB cards will not work. https://askubuntu.com/questions/1134859/sd-card-not-mounting-with-mmc0-error-110-whilst-initialising-sd-card https://patchwork.kernel.org/patch/11088719/ Collection of RPi "partial" schematics. (But not RPi5) https://www.raspberrypi.com/documentation/computers/raspberry-pi.html#schematics-and-mechanical-drawings RPi4 board revision. https://www.cytron.io/tutorial/how-to-check-if-your-raspberry-pi-4-model-b-is-rev1-2 Crimp on ferrules. (From our HTML meeting index) http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20230112 @10:35
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:20 Jeff: Powering RPi5 with batteries. 06:45 Jeff: The extra requirements for power supply "negotiation". 19:05 Jeff: Stories about getting the RPi4 to run again. 21:00 Jeff: Trying to read existing Micro SDFlash card on Ubuntu laptop. And reloading the card with Ubuntu 24.04. 24:10 Jeff: Found that 32GB Micro SDFlash cards will not work on Ubuntu laptop. 28:45 Al: Advice on booting. Initially, boot from from SDFlash and not USB devices. 29:20 Jeff: Also suggests starting with an official RPi power supply instead of battery power. 30:15 Al: Shows more about his new radio control PCB. 46:20 Al: Wants to reprogram his Teensy 4.1 without removing it from the board. 51:10 Jeff: Suggests running an RPi5 from an RPi4 power supply. Which would simulate not having PD negotiation. 52:30 Jeff: Mentions that some of the RPi boards have "partial" schematics posted. 53:10 Jeff: More than one revision of RPi4 board. 54:00 Jeff: Some more comments on the new USB power supply. 56:55 Al: Asks about wires in screw terminals. (crimp on ferrules) 59:30 Al: Anecdotes about soldering.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Found an interesting use of IBT-2 motor controllers https://www.xsimulator.net/community/threads/full-frame-2-dof-traction-loss-new-build.14740/ and an interesting motor https://www.ebay.com/itm/324674657479?skw=Crab+pot+motors&itmmeta=01JH70BBGPRQ743BQVZST5NC4A&hash=item4b981e1cc7:g:LWoAAOSwZfBgxWcC&itmprp=enc%3AAQAJAAAA8HoV3kP08IDx%2BKZ9MfhVJKnhK%2FzQp60yW5jYSucyCilU4sCOJO1i5emQtPhZLRHOsvvIJFOgNnV7bR6IFOH3VqOIS5eGhrLpVZRNuAWkE9rO44f5tt%2FfEkmLhzCB9DFJeAb%2BkQNUzNM9fPlEkyIaUhKwQ2GNb3xM5a9yXXElo5Pb7ZSaaQ%2BJ%2FJO6ImA%2Bs80dWfJXvImSx45A07J37gvATkK8uUHc5WGTewx92SmB70nAQ9k4iBstkzrvdWpBeVydSHs1PZ8HYcBGbU1GvYnmlhx4nkjM5SJ0QHJFOSJlUHmKQHmTs1OqQyfEPsbbHgZEtw%3D%3D%7Ctkp%3ABFBMvLit4Ill|https://www.ebay.com/itm/324674657479?skw=Crab+pot+motors&itmmeta=01JH70BBGPRQ743B[…]0QHJFOSJlUHmKQHmTs1OqQyfEPsbbHgZEtw%3D%3D%7Ctkp%3ABFBMvLit4Ill


While I’m waiting for parts (wall wort and etc.) to arrive thought I’d put my battery together. Right hand switch will go to a step down and then on to the Rpi-5 circuit. The left hand switch will go to a vex controller and RC transmitter. Eventually I’ll replace the power hungry lights with led status lights. Right now I just want to get something up and working.

I got my Amazon order today. I decided to go with this one for a number of reasons. This way I can see how much current additional peripherals will take individually. Then plan accordingly. Eventually I may go with what Jeff and Al are using after I gain some experience.

Did a preliminary test. With no micro card in the Rpi5 and using the official ww, The green light came on as well as the fan. Next test was battery power. Same results, green light and fan working. Looking like it draws only 0.75 amp.
Next is to setup micro card with 24.04.

I'm not having luck getting this example to work with Jazzy and Ubuntu 24.04. https://micro.ros.org/docs/tutorials/core/teensy_with_arduino/
I'm thinking I will have to try the Docker approach which I would really prefer not to. 😞
@Al Jones I’ve started reading the AutomaticAddison you used. Any advise? Go with the virtual box or docker? I don’t know them, I’ll have to learn. I did get an error message saying I have to add c++.
*Thread Reply:* I would use your RPi with Ubuntu instead of using Docker.
*Thread Reply:* Thanks. I’ve been spoiled by iOS point and click. This command line stuff- telling it what to do is frustrating. ;-(
*Thread Reply:* @Bob Hassett I previously took a snapshot of my command line history after completing the Automatic Addison tutorial which is attached. If you want to have a Zoom call to walk through it let me know. As I recall I had some issue getting Gazebo to work correctly down around line 28, but eventually got it resolved by line 48. https://automaticaddison.com/how-to-install-ros-2-jazzy/
@Al Jones What problems are you having with https://micro.ros.org/docs/tutorials/core/teensy_with_arduino/ ?
And why do you think that adding another layer of complexity will solve your problems?
I haven't looked at micro-ros up to this point. But if I dig through I would like to hear what problems you have.
*Thread Reply:* The simple problem is a basic publisher does not publish; And to add to the issue there are no error messages I've found. Software installs clean; Script compiles clean and UART's, both USB and Serial5 on Teensy can talk to RPi when using non-ROS code.
I don't think adding complexity is better. If I can get a Teensy to work on 'Foxy/20.04' then I'm hoping it is easier to figure out why its not working on 'Jazzy/24.04'.
@Bob Hassett Uh, you have to be a little more specific when you post. If you don't tell us, then we don't know. Are you trying to load an RPi5 or a laptop?
When @Al Jones said he followed Automatic Addison, I don't think he meant that literally. The first Automatic Addison page says you need
A computer or virtual machine running Ubuntu 24.04. If you followed my previous tutorial, you already have that setup.
Well, you don't want to follow his previous step. He is loading Ubuntu AMD64 24.04 under a docker container or under a virtual machine on a laptop running Windows.
But as he says you need a computer that has Ubuntu 24.04 installed on it. If you are trying to load an RPi5, then you need Ubuntu arm64 24.04 (server or desktop). So you need to load arm64 24.04 directly to a SDFlash card.
I was able to do that without downloading any ISO image. And I don't think I had to do any command line stuff. After I post this, I'll try to track down what I did.
After you get an RPi5 running Ubuntu, then you need separate instructions to load ROS2. (the instructions may be the same for ARM64 or AMD64...) The Automatic Addison instructions for loading ROS2 Jazzy may work for that.
"After I post this, I'll try to track down what I did."
So this page https://ubuntu.com/download/raspberry-pi says you can get Ubuntu 24.04 server or desktop and you can load them on RPi4 or RPi5. (I have RPi4) It also says you can install rpi-imager to download and burn the image. I got the Linux version and followed some other tutorial. If you follow the link for rpi-imager it says you can get versions for Linux, Windows, MacOS. And has download links for rpi-imager. https://www.raspberrypi.com/software/
And before you actually try doing this, maybe tell what computer/OS you want to use to burn the SDFlash card (as mentioned above).
Because if you follow this link https://ubuntu.com/tutorials/how-to-install-ubuntu-desktop-on-raspberry-pi-4#2-prepare-the-sd-card it will ask you what rpi-imager you want to install. And based on the type of computer you have to get the name of the SDFlash card socket. If you get that wrong you can wipe out everything on your computer.
The dialog box I get has a new box. It says "Raspberry Pi Device". Set that to Raspberry Pi 5. Then when you do "Operating System" you select "Other General Purpose OS" and then "Ubuntu". It will show you what is available for RPi5 (since you just set that). You probably want to choose "Ubuntu Desktop 24.04.1 LTS (64-bit)". (Al says don't use 24.10)
So tell us what computer you want to use to burn the SDFlash card. So we can figure out the drive name...
I found an old 32GB card that I could actually read. So I ran rpi-imager again (on Linux) and it worked. Turns out the output card selection isn't as cryptic as I thought. When you click in the select box, it goes out and searches your computer for extra drives. It lists the drives by capacity and passes along a name and a size. It told me I had a "ASMT PNY CS900 250GB SSD - 250.1 GB" and a "Multiple Card Reader (system-boot. writable) - 31.0 GB". I selected the 31.0GB card and it was happy. I assume it will work the same way on a Windows laptop.
PS: I have an external 250GB SSD plugged into my computer. That is the extra drive that shows up.
This looks like a fairly complete video for using rpi-imager. https://www.youtube.com/watch?v=YmmThbZmNIw

And to go along with anything that Automatic Addison,may say, here is the official write-up on installing ROS2 from binary packages. https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
Thanks @Al Jones and @JeffS for the feed back and offers. I’m going to spend time rereading all of this for more clarity so I clearly know what I don’t know. I’ll be back.
1 problem I have...im following the video trying to down load imager 1.7.2 but it always comes up with imager 1.8.5. the later doesnt show the 'gear" and I cant complete the rest of the setting.
The reason you get 1.8.5 instead of 1.2.7 is because 1.8.5 is the current version. If you watch the video a little closer you will hear him say "If you are loading a Raspberry Pi OS then you will get the gear." If you are loading anything else you probably won't get the gear. Just load the card and put in the RPi and turn it on. It asks you all of the questions there.
It's at 11:03 in the video when he says if you are loading Raspberry Pi OS then you get the gear. At 13:00 he says it again in a slightly different way.
Well this was a pain, but I have it working. I have my RPi 5 booting from a 500GB USB drive with Ubuntu 24.10. I then loaded Docker on it. I then installed an Ubuntu 24.04 inside Docker. I then followed slightly edited Automatic Addison commands to get Jazzy installed and ran the demo programs. Not a simple process.
Now I want to try and get the Teensy example running, but it uses a different Ubuntu and a different ROS2 version, hence the reason to figuring out Docker (at least nominally).

*Thread Reply:* Making some progress getting my Teensy to talk to ROS. Current status is I worked through the example here. Unfortunately near the end when compiling the Teensy Example I hit a compiler error that looks like it can't find the correct compiler. Will try and find a fix today.

*Thread Reply:* Not having success solving how to use ArduinoIDE with Teensyduino and micro-ROS. Moving to try PlatformIO instead.
https://github.com/micro-ROS/micro_ros_platformio
*Thread Reply:* I think I might just use serial communication back and forth and skip the micro-ros debacle. I've been at it all day and moved past platformio to straight make with a makefile and can't get it to work there either. 😞
*Thread Reply:* I decided to try and compile a micro-ROS program on my W10 machines with Arduino 2.3.4. After multiple tweaks I could not get that to work. Then I tried a plain PlatformIO install and after a tedious process to figure out the libraries and the platform.ini file I was able to get a clean compile using a Humble version of micro-ROS. Now to actually test it on my RPi, because at this point all I have is a clean compile on my Teensy using the micro-ROS library.
mkdir micro_ros_teensy
cd micro_ros_teensy
git clone -b humble <https://github.com/micro-ROS/micro_ros_arduino.git> lib/micro_ros_arduino


In order to follow along I am going to do step 2, loading ROS2 Jazzy on my RPi4 which has Ubuntu 24.04.
@Al Jones You might want to view this in your spare time. It might give you a clue. I assume this is a replacement for ROS1 ros_wtf. https://automaticaddison.com/using-ros2-doctor-to-identify-issues-ros-2-jazzy/
I got step 2 done. Now I should play with it and see if I can make ROS2 run. I haven't rebooted so I should do that a couple of times. And I had to set up Slack on the RPi. Which forced me to setup email on the RPi.
I have been fighting all night with trying to copy an SDFlash card for a backup. I loaded a card with Raspberry Pi OS and booted. So far I haven't found any old flash cards that the copy utility will talk to. While I had RPI OS booted up I tried both Firefox and Chromium browsers. Neither one of those was usable. Firefox runs just fine under Ubuntu.
So at the moment I am trying to use dd to make a backup image on my laptop.
*Thread Reply:* After another day of fighting/playing with SDFlash cards I was able to run from a backup copy. My biggest problem was that all SDFlash cards seem (may) be different actual sizes. So I had created my backup image that is bigger than the cards I am trying to copy to. (15.9GB vs, 15.5GB) One way is to copy the 16GB image to a 32GB card, which is what finally worked.
From an old video (6 years ago) it looks like the Windows version nay have a check box to solve this problem.
From the ROS Agriculture index: http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt I found a previous discussion on this. 12202019 Lawn Tractor Meeting - @13:40_20:00 https://www.youtube.com/watch?v=dWHoIJrZajg
Another approach may be to trim down your Linux partition before doing the backup. I haven't tried that yet. But The Windows utility is probably the way to go.

*Thread Reply:* Ive decide to put my Rpi-5 on hold until after we move again in 6 weeks ish. So I turned to my Lenovo with windows 11. I was able to install 24.04 under the wls subsystem. I then tried to install Jazzy. Every thing was looking good down to the speaking example until where it called for another terminal. I got interrupted and things shut down. Today it looks like I can start 24.04 but jazzy wasn’t there, So I’ll reinstall now that I know how to open multiple terminals. So if I can finish the install how do I make sure Ubuntu and ROS will startup again? How do I save my work?
*Thread Reply:* Here, let me try this again...
I don't know what you mean by "but jazzy wasn’t there".
"So if I can finish the install how do I make sure Ubuntu and ROS will startup again?" You can start the talker/listener demo and verify it runs. Shut down both terminal windows. Then do it again. If you can do that repeatedly then ROS is working. At that point shut down Ubuntu (correctly). Then start it up again. Verify it looks like it is working correctly. Then run your talker/listener demo a couple of times. If that works, shut down Ubuntu (correctly). Shut down windows (I don't know how that wls subsystem works). Then do the whole over again. If it goes through all of that repeatedly, then it is working.
You asked "How do I save my work?". I don't know what you mean.
*Thread Reply:* "Today it looks like I can start 24.04 but jazzy wasn’t there," Also I'm not sure what you mean by "jazzy wasn’t there," It ignored your ROS2 commands? Or it gave you an error?
You can dig through some of these to see if ROS2 is indeed missing https://duckduckgo.com/?t=ffab&q=how+to+check+if+ros2+is+installed&ia=web
*Thread Reply:* Finally! Talker and listener working. Now how to stop them and look at the graphs?
*Thread Reply:* Seems I don’t have the proper plugin. More reading Which plug in you you guys use ?
*Thread Reply:* Again I have no idea what you are talking about. I don't know what "Got it, just keep asking browser." means. "Which plug in you you guys use" again I don't know what you are talking about. I probably have hundreds or thousands of "plug-ins"...
*Thread Reply:* When I said got…it meant I searched a browserfor and found the command and understood it to be CTRL C. My lesson learned was just keep using a browser to learn what I want. When I tried to ask to see the node graph it just gave me an error message saying I didn’t have the proper plugin..anyway I think I’ll just shut for awhile, read more and slug it out.
@channel We are going to do the weekly meeting on Friday this week. We usually do it on Thursdays at Noon Eastern time.
So this week the meeting will be Friday, 17th at Noon Eastern time. If you want to join the meeting then the link to Zoom is: https://us02web.zoom.us/j/82088036016?pwd=K2lLc1FiWm9MU0dzRStxM2J2b3dpQT09
I’ve had limited success installing 24.04 and ROS 2 Jazzy. I’ve been able to activate the talker and listener nodes examples. But there I’m stuck. Sooooo how about we do a zoom meeting going back to the beginning of the documentation? I’ll have to put zoom on my laptop. I could share a split screen with the docs in one and terminals in the other. Basically going line by line for “the complete idiot” :-) . Not tomorrow but maybe next week?
Here, let me delete my rant from a random thread. And I will respond here...
Well @Bob Hassett, the next step is to go to the tutorials and demos: https://docs.ros.org/en/jazzy/Tutorials.html
PS: You don;t have to "put Zoom on your laptop:", you can access it through your browser.
@Al Jones A quick search suggests that people "may have" attempted to get ros-serial to run under ROS2: https://duckduckgo.com/?t=ffab&q=ros+serial+ros2&ia=web
Info from today's video meeting.
====== 20250117 ROS Lawn Tractor Automation meeting - Length 1:00:42 This video: https://youtu.be/WiBqk2mw-Nc
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
First Robotics: A Youtube of the Sunday First Robotics tournament. https://www.youtube.com/watch?v=tFSW9bpwrdA&t=1403s
We are team 26205. We are featured at times: #6: 49:00 #10: 2:10:00 #14: 2:33:30 #23: 3:22:08 #31: 4:04:15 #37: 4:36:00 We Ranked 5th out of 26 teams. State Tournament Qualification Announcement: 6:53:30
Yarbo: The Yarbo youtube group - The autonomous snowblower https://www.youtube.com/@yarboglobal
Spyker: Spyker Workshop - the RC Snowblower https://www.youtube.com/@thegreatestmoo
Ferrule videos: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm@20250109 @56:55 http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20230112 @10:35
Copy flash cards (from ROS Agriculture): https://www.youtube.com/watch?v=dWHoIJrZajg @13:40_20:00
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:30 Terry: Mentions his First Robotics team. 01:15 Terry: Talks about his autonomous snow blower/thrower. For previous discussion see http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250102 Mentions other web sites for reference. 04:45 Terry: Shows more of his 3D CAD for his snow blower parts. Discussion about how it works. 11:00 Al: Asks about the First Robotics objective. Some discussion. Reference to video of the tournament. 13:10 Al: Mentions using Miro Board for documentation. 14:50 Jeff: Shows the USB-C cable and Drok power supply from Amazon to power RPi. This was mentioned last week. http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250109 17:10 Jeff: Goes off on a tangent about screw terminals. 21:55 Jeff: "Yes, this will power an RPi4. But an RPi5 requires extra configuration..." 23:40 Jeff: Bob's RPi5/Drok setup to power RPi5. 29:00 Jeff: Mention of crimp on ferrules. 31:35 Jeff: Talks about SDFlasn cards. Various stories. 40:00 Jeff: Complains about the official Raspberry Pi OS. Specifically worthless browsers. 42:10 Jeff: Moves on to loading micro-ros onto ROS2 Jazzy. 44:55 Al: Talks about both ends of mirco-ros. The Teensy end seems to be the problem. 49:10 Al: Comments about SDFlash cards. Jeff talks about unmounting cards. 50:15 Jeff: Was confused about what Al's problem was. 55:15 Terry: Asks differences between micro-ros, ros_serial or just plain serial.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

After days of screwing around trying to live with windows and Ubuntu on the same laptop, I decided to remove windows and install Ubuntu 24.04 as the startup and only os on my laptop. Now I need a wing and a prayer as I try for ROS 2.
Finally Worked through the Automatic Addison article to install ROS 2 Jazzy. Took a while and reading, one has to use shift insert, for cutting and pasting. Gazebo comes up nice.
Got all the way through down to “terminator”. The panel for splitting screens and etc doesn’t show up but the key commands do work. I guess I’ll have to make a little post-it to remind me.
Just fyi, I powered up my RPi 5 using a power supply from my RPi 4 which, as reported by @JeffS , would trigger a warning and prohibit booting until I added 'usbmaxcurrentenable=1' to the config.txt file in /boot/firmware . I then used the command Jeff showed me 'sudo vcgencmd pmicread_adc' to get the following data about power usage:
3V7_WL_SW_A current(0)=0.00000000A
3V3_SYS_A current(1)=0.11223200A
1V8_SYS_A current(2)=0.21860830A
DDR_VDD2_A current(3)=0.01366302A
DDR_VDDQ_A current(4)=0.00000000A
1V1_SYS_A current(5)=0.35719040A
0V8_SW_A current(6)=0.48796500A
VDD_CORE_A current(7)=1.59847000A
3V3_DAC_A current(17)=0.00000000A
3V3_ADC_A current(18)=0.00006105A
0V8_AON_A current(16)=0.00482295A
HDMI_A current(22)=0.01709400A
3V7_WL_SW_V volt(8)=3.68400100V
3V3_SYS_V volt(9)=3.35735900V
1V8_SYS_V volt(10)=1.79535800V
DDR_VDD2_V volt(11)=1.10549400V
DDR_VDDQ_V volt(12)=0.60549390V
1V1_SYS_V volt(13)=1.10329600V
0V8_SW_V volt(14)=0.79780140V
VDD_CORE_V volt(15)=0.87946190V
3V3_DAC_V volt(20)=3.30402600V
3V3_ADC_V volt(21)=3.30402600V
0V8_AON_V volt(19)=0.79618980V
HDMI_V volt(23)=5.26218000V
EXT5V_V volt(24)=5.26218000V
BATT_V volt(25)=0.00000000V
Which I believe is telling me I'm using ~3.1 watts (0.000+0.377+0.392+0.015+0.000+0.394+0.389+1.405+0.0038+0.0002+0.090=3.066W) If I'm doing the math right of VoltsXAmps for each of the sub systems. The RPi is booted from a 128GB USB SSD and is using the HDMI port. Still seems pretty low I'm going to guess measuring power consumption 'at the plug' would be higher.
*Thread Reply:* @Al Jonescould the volts and currents be exported to a spreadsheet?
*Thread Reply:* @Bob Hassett I have not automated extracting the data. I just hand built a spreadsheet. Here is the link.
*Thread Reply:* If you just want the values in a spreadsheet then you can do this:
sudo vcgencmd pmic_read_adc > bobsfile.csv
Then open bobsfile.csv with a spreadsheet.
Another new RTK GPS. From Home Brew Robotics list: https://groups.google.com/g/hbrobotics/c/zUByLC0JVCg
An informative video on RTK GNSS. https://www.youtube.com/watch?v=Oc1LBFDj2MA
@JeffS I wonder how it would compare with your dual antenna setup? The one on your mini tractor?
Trying to run the micro ROS tutorial here https://micro.ros.org/docs/tutorials/core/teensy_with_arduino/ I'm getting an unexpected error when running the command
ros2 run micro_ros_setup build_agent.sh
The cause might be the slow internet I'm on :(

It does look like it might be an Internet problem. What does it do if you just that again?
I was thinking I should go on Home Brew Robotics tonight and ask if anyone there has a good reference to install Micro-ROS.
I got past the step you are on. On a RPi4, 24.04, Jazzy.
I got up to the step with Arduino/Teensy where I said compile the publisher example. Arduino IDE said it could not find the ARM compiler. So it looks like something in the install hammered my path to the compiler. I might look at it some more tonight.
*Thread Reply:* It failed again; So I downloaded the .zip file which is going through the build process again. My issue seems to definitely be linked to my slow internet.
*Thread Reply:* root@tractor:/# ros2 topic list shows '/teensy_publisher' which I'm interpreting as positive. I'm using Docker and ROS Foxy instead of Jazzy, but at least I've gotten this far. I will be interested to see how @JeffS is going with Jazzy.


*Thread Reply:* I successfully loaded everything on laptop, 24.04, Jazzy, Arduino 2.3.4 and the other tid-bits. I loaded the Teensy 3.2 example and it won't compile on Arduino. I found the answer here: https://github.com/micro-ROS/micro_ros_arduino/issues/1491 It's not what I wanted to hear. But it was 5AM and I decided to worry about it today.
I'll post a few more comments/impressions after I go look at what Bob is posting about.
 <a
href="https://github.com/micro-ROS/micro_ros_arduino">micro-ROS/
micro_ros_arduino</a>
<a
href="https://github.com/micro-ROS/micro_ros_arduino">micro-ROS/
micro_ros_arduino</a>
*Thread Reply:* Oh, I just realized that I am on my laptop and it has 20.04 as opposed to 24.04. And this laptop has foxy instead of jazzy. I don't know if that oversight is causing me any problems...
*Thread Reply:* So I did ask about Micro-ROS at the Home Brew Robotics meeting last night. Much to my surprise only one person said he was running it. That was Michael Wimbal. He builds fancy/advanced robots.
Camp Peavy posted a link to linobot2 (the links are on my other computer). It does appear linibot2 is using Micro-ROS and Teensy 3.2.
Camp Peavy is using one of the vacuum cleaner robots and they had a pre-defined Other people said they just made their own protocol and send serial messages (like I do).
I got several links from Michael, I'll have to go look those up. I had lots of comments, which I may or may not remember...
I’m trying to understand the bash file. The bash file is in the root directory? And comes up every time I call up Terminal?
So every time I open a new terminal and see the command line…I’m actually in the System shell using commands….I think?
But I see this:
bash: /home/bob/.bashrc errors messsages. I’m not concerned about the particular error at this point. Should I install ROS 2 in the root directory? Or is this message is telling me Everything is in my user file /home/bob/ etc.?
Once I’m in ROS 2 per Automatic Addison tutorial, and I call up terminal is that the bash file in the root directory?
Can some one help me understand when someone says “open system shell”vs just “open shell”? What’s the difference?
*Thread Reply:* The .bashrc File:
The file /home/bob/.bashrc is specific to your user account (Bob's home directory). This file contains commands and configurations that are run every time you open a new terminal in an interactive shell. Errors here mean there’s something in your .bashrc that the shell cannot execute correctly.
System Shell vs. User Shell:
• When people say "open system shell," they typically mean accessing a shell with system-wide permissions, usually as the root user or with sudo.
• When they say "open shell," they just mean opening a terminal and using your default shell (in your case, bash under your user account).
• Key Difference: A "system shell" is usually a way to emphasize administrative or system-wide access, while a "shell" is any command-line interface.
ROS 2 Installation:
It’s best to install ROS 2 in a directory where your user has permissions—this is often under /opt/ros/ (a common convention). You don’t need to install it in the root directory (/) itself, nor in your home directory. The installation process will likely require sudo to place files in /opt/.
Understanding the Terminal Prompt:
• When you open a terminal, you’re running your shell (like bash) as your user (not the system or root user unless explicitly switched with sudo or su). The system uses your .bashrc file to configure your environment.
• If you're following the Automatic Addison tutorial, it will often ask you to source setup files (like source /opt/ros/foxy/setup.bash) to set up your environment for ROS 2.
Next Steps:
Fix the .bashrc errors by carefully reviewing the file. Make sure that all commands and paths are valid. If you’re unsure, feel free to share the specific .bashrc snippet causing issues, and we can help troubleshoot.
*Thread Reply:* @Bob Hassett "I’m trying to understand the bash file. The bash file is in the root directory? And comes up every time I call up Terminal?"
Terminology: No, you don't have a "bash" file. (well technically you do, that file lives at /bin/bash. It is the executable program that gives you the command prompt. I.e, the "bash shell interpreter".)
You do have a "bash shell script files". In this case you specifically have one called .bashrc. That (and most other things) are not in your root directory "/". .bashrc file exists in you home directory "/home/bob".
Your .bashrc file does get executed when you start a new terminal window. The terminal starts the bash interpreter as opposed to a different shell interpreter (like sh) because the people at Ubuntu configured it that way.
But the immediate point is that when you open a new terminal then .bashrc aromatically gets executed.
"So every time I open a new terminal and see the command line…I’m actually in the System shell using commands….I think?"
This "system shell" is new to me. I don't know what that means. But.. if you open a terminal then you get a command prompt and you can execute commands on the command line...
"But I see this:bash: /home/bob/.bashrc errors messsages. I’m not concerned about the particular error at this point."
If your bash interpreter says you had errors when executing your .bashrc file, then they need to be fixed. It has nothing to do with ROS or where stuff is installed or anything else.
A shell script file is just a collection of commands you want to be executed. It is like in DOS you have "batch files" which are just a list of DOS commands. They moved this forward into Windows so Windows still has batch files.
So if your error may be something like:
source /opt/ros/jazzy/setup.bash Setup.bash file not found
So in this case it is saying it can't get to the setup.bash file in your ROS install. It is not saying there is anything wrong ROS. It is certainly not implying something as major as ROS being installed in the wrong location. It is simply saying that the command "source /opt/ros/jazz/setup.bash" can not be executed. The error message that you ignored should give you a good indication. It may also just be a spelling error.
"Should I install ROS 2 in the root directory?"
No! If you followed a valid tutorial then ROS will be installed where is is supposed to be. The "normal" location is under "/opt/ros/jazzy". You can go look and see it there. (Automatic Addison uses the commands from the official tutorial and he adds a few suggestions and comments, so it should be in the right location)
When you follow the official tutorials: https://docs.ros.org/en/jazzy/Tutorials.html it will probably suggest locations for things. Like: https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Creating-A-Workspace/Creating-A-Workspace.html Specifically: https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Creating-A-Workspace/Creating-A-Workspace.html#create-a-new-directory It is creating the workspace for this tutorial under your home directory. So we can extrapolate and say each new workspace you create should be done under your home directory. I.e., anything you create to make ROS run will go in those workspace directories which are located in your home directory..
Automatic Addison probably has similar steps for creating a new workspace for his tutorials.
"Or is this message is telling me Everything is in my user file /home/bob/ etc.?"
No! It is simply telling you that a single line (command) in your .bashrc can't be executed. And they should be telling you why it can't be executed.
"Once I’m in ROS 2 per Automatic Addison tutorial, and I call up terminal is that the bash file in the root directory?"
First of all, technically you are "not in ROS2". You have "installed" ROS2, which is a collection of libraries. And neither ROS or Automatic Addison have anything to do with terminal windows. As mentioned above, you can open a terminal at any time from any location and it will start a bash interpreter and also execute the lines in your .bashrc file (which is in your home directory).
"Can some one help me understand when someone says “open system shell”vs just “open shell”? What’s the difference?"
Again I have never heard of this "system shell". Maybe there is a difference, I have never had to know that. I'm assuming that if you are following a tutorial and "people say" open a system shell, they will list the command below to do that, so you would know by context. Next time you find an example of "people" saying that, can you post a reference to that. (I'm wondering if this a case of "people say" is similar Trump's statement of "people say" as he proceeds to lie endlessly. :-) Or if I have been blind to this difference all of these years. :-) )
I'm tired of typing and this may or may not answer your questions...
*Thread Reply:* Thank you @JeffS I’m beginning to understand better. I’ll dig thru and better identify stuff.
I completed the Addison tutorial with no problems. The error that was reported happened when I started the ROS.org tutorial. More specifically when the tutorial talked about ROS DOMAIN ID. I think I introduced an error when trying to set the integer to 0. I copy/pasted the command and then set =0. So I may have inserted the problem at line #122.
Any way I removed ROS per Addison directions. So I restarted the laptop thinking everything ROS related was gone. Thinking I’d get a fresh install. But it looks like I screwed that up as well. I called up a new terminal and got this:

I’m going to reinstall ubuntu and ROS and start over tomorrow. Now that I know better.
Info from today's video meeting.
====== 20250123 ROS Lawn Tractor Automation meeting - Length 52:37 This video: https://youtu.be/zDjccCLL370
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
Running Micro-ROS on a Teensy using Arduino IDE. https://micro.ros.org/docs/tutorials/core/teensy_with_arduino/ Bug report about _localectype_ptr issue. https://github.com/micro-ROS/micro_ros_arduino/issues/1491 Various links from the Home Brew Robotics meeting. Responses after meeting: https://groups.google.com/g/hbrobotics/c/Q9GfWUAG8x8 Camp: https://github.com/linorobot/linorobot2?tab=readme-ov-file Michael: Here’s how I create a custom MicroRos with enhanced resources: https://docs.google.com/document/d/1zK3SwKIC5RR9f-bLyeXuWuK3pyJO_6_w5IBDYwLBftQ/edit?usp=sharing And this: https://docs.google.com/document/d/1YstDMvXV-CNdXFkPmAu3edRpzCSSLczm2AMOBwKAb90/edit?usp=sharing github: https://github.com/wimblerobotics/Sigyn/tree/main Sergei: https://photos.app.goo.gl/jwYZRtTi1LVshQoW8 https://github.com/slgrobotics/robots_bringup/tree/main Marco: https://www.youtube.com/watch?v=Duys_q16pEA
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:35 Terry: Talks about his autonomous snow thrower. OnShape, CAD model animation. 02:50 Al: Switching from ROS1 to ROS2. RPi5, Teensy 3.1, Micro-ROS. PlatformIO, Micro-ROS with Docker. 08:00 Al: Shows tutorial results of Foxy under Docker. Says Micro-ROS seems "heavy". Maybe just use simple serial messages instead. 09:00 Al: Comments about powering his RPi5. Differences of versions in Micro-ROS experiments. 10:00 Jeff: Will Micro-ROS talk across different ROS versions? 11:00 Jeff: Talks about what worked and what didn't. Micro-Ros on 24.04 and jazzy works on ROS without Docker. Can't do any Arduino compile work without Docker. 12:00 Jeff: Arduino can't find compiler or has undefined references. Problem appears to be that the precompiled library they supply has to use the same compiler we are currently trying to use. 19:00 Al: Shows how he used PlatformIO to compile the Teensy code. The message he is referring to is https://tractorautomation.slack.com/archives/C8X6X6H7D/p1737071653511209?thread_ts=1736798698.213119 if you are on our Slack. 22:50 Jeff: Speculates on not using either Arduino or PlatformIO to compile. 25:40 Al: Again says he may just go with custom serial messages. 25:45 Jeff: Random discussion from the Home Brew Robots meeting. Who is using what... 29:05 Jeff: Posts a lot of links to be put in the description. (See chat section above) 41:35 Jeff: Sums up his progress on Micro-ROS. 42:10 Jeff: Again mentions/speculates compiling without Arduino or PlatformIO. 43:30 Jeff: Complains about the way tutorials are written. (Not that he could do any better...) Points out he loaded a mismatch of versions since the tutorial was out of date. 45:40 Jeff: Moved on to the Arduino 2.3.4 install and used careful guessing to make it work. Which ended in the undefined reference. You should re-compile the pre-compiled part. 46:30 Jeff: Talks about ethernet on the Teensy 4.1. 48:20 Jeff: Mentions multiple copies of Micro-ROS running. 49:50 Jeff: Goes on a rant about YouTube uploads to finish off. (Will I get banned from YouTube if I say YouTube in the description?)
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

I think I fixed line 122. Reset profile and bashrc
Now to start over with ROS 2 and see if it is fixed?

This GNSS GPS https://navspark.mybigcommerce.com/px1172rd-evb-px1172rd-l1-l2-rtk-dr-evaluation-board/ markets having dead reckoning in GPS starved environments.
"The sensor-fusion algorithm combines 3-axis accelerometer, 3-axis gyroscope, GNSS measurement, wheel tick, RTK base correction, and vehicle dynamics model to provide best-in-class position accuracy when GNSS alone fails."
My faith is diminishing based on no YouTube hits, no GitHub hits, and the attached email exchange with their support. Sad 😞 Maybe just feed it data from one wheel? That would seem pretty odd.

*Thread Reply:* Nice video at Mouser showing a U-Blox model that seems to have dead reckoning https://www.mouser.com/new/u-blox/u-blox-evk-m9dr-kit/#Bullet-2
*Thread Reply:* Additional reference links for uBlox EVK-M9DR-0:
Above video YouTube link; Datasheet at Mouser link; Product page at Mouser https://www.mouser.com/ProductDetail/u-blox/EVK-M9DR-0?qs=rQFj71Wb1eVqrKznG%252B8szA%3D%3D|link

Here is another thread on HBRC that is worth following. (until they start talking about wood and plastic construction techniques...) https://groups.google.com/g/hbrobotics/c/e5q9GjFtJc4
I see he mentions the original thread started on the RSSC list here: https://groups.google.com/g/rssc-list/c/CW4pFGAY97o/m/9Z2Prf1RAgAJ
Just an intro video, but it will be interesting to watch to see when/if they get into the micro-ROS discussion.... https://www.youtube.com/watch?v=uJuC1zkUsZ8
@Al Jones Ha HA! He says. After about a week of fighting with Arduino/Teensyduino/Micro-ROS and other weird things, I got the publisher demo to work.
I have an RPi4 with Ubuntu 24.04 and Jazzy installed. Last week I built the ROS node that talks to the low level board (NO Docker). That ran and gave me the results they said should get. Then I spent about a week trying to install Arduino and Teensyduino extension and the "pre-compiled" Micro-ROS library. And for about a week I could not get it to compile.
My current version has Arduino 2.3.4, Teensyduino 1.57.3, the entire collection of pre-built Micro-ROS libraries. And it finally compiled on a laptop with 20.04 and Foxy and NO Docker. So the Teensy 3.2 board (which was built under Foxy/Arduino 2.3.4/Teensyduino 1.57.3 is talking to my RPi4/Jazzy/Micro-ROS Agent.
I was going to give up completely several times over the last few days. But I found a smoking-gun post tonight and decided to fight with it one more time.
Now I have to figure out what it is and what to do with it.


It occurred to me that I could try to compile for a Teensy 4.1 (even though I don't have one). So I switched the board from 3.2 to 4.1 and it compiled.
I was thinking I could track down some videos on Micro-ROS. But maybe I should just go to bed...

How about this one for micro ROS
https://youtube.com/watch?v=SV7DeB7kDZs&si=T99JjdD3Iag_Govc

@Bob Hassett I watched that video a couple days ago. I need to watch it again.
I have been on a roller coaster. About a week ago I had Micro-ROS compiling on Arduino 2.x on my laptop. It was a pain to get it to work, but it finally did.
Then I decided to load Arduino 2.x on my RPi4. That wasted a day because Arduino 2.x will not run on ARM.
So I went back to trying to get Arduino 1.8.19 to run on my laptop. (which meant I blew away my only working copy of Micro-ROS) After loading that I was back to the point where it would not compile Micro-ROS. It simply said it could find the compiler. (which is what my original attempt did about 2 weeks ago) That wasted another day.
Then I went back to trying to install Arduino 2.3.4/Micro_ROS on my Ubuntu/Foxy laptop. I was following the video that Bob posted. I had a feeling it wasn't going to work when I was finished. It didn't.
I tried the trick of downgrading the Teensyduino 1.59.0 to 1.57.3. It still didn't work. And when I restarted the Arduino IDE it offered to update my libraries. I said yes, it said I'm deleting 1.57 and reinstalling 1.59 (while it had a real smug digital smile on its face). It still didn't work. I reloaded 1.57.3 and ran the "patch" step again. Of course it offered to "fix" my libraries again. I said NO! That wasted most of today. But I got it running just as the Home Brew Robotics meeting was starting.
Now it works again. (reliably?) I don't know if I can recreate the build process again, though.
I still don't know what exactly Micro-ROS is or what it does... Just communication?
Info from today's video meeting.
====== 20250130 ROS Lawn Tractor Automation meeting - Length 44:11 This video: https://youtu.be/_rR1XtKgd8E
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
"Official" Micro-ROS Teensy Arduino tutorial. https://micro.ros.org/docs/tutorials/core/teensy_with_arduino/
Aleksander Haber - Install Micro-ROS for Teensy. https://www.youtube.com/watch?v=SV7DeB7kDZs
Video on u-blox dead reckoning. https://www.youtube.com/watch?v=gkCmXT_K4nI
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:30 Jeff: Talks about Micro-ROS experiences. 00:45 Jeff: Original Arduino 1.8.19 on laptop. Failure. 01:20 Jeff: Arduino 2.3.4 on laptop. Failure/success. 03:35 Jeff: Install Arduino 2.3.4 on RPi4. Failed since Arduino doesn't support ARM for 2.x 04:45 Jeff: It was suggested to load Arduino 1.x on RPi. That loaded and ran. But I decided I may have the same AMD64/ARM64 problem with the Teensy installers. So I didn't have the patience to find out. So I moved on. 05:25 Jeff: Mentions the Micro-ROS discussion at HBRC meeting. Although I think it was the week before that had the long discussion. Recap/links here: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250123 05:45 Jeff: Again tried to load Arduino 1.8.19 on laptop. Failure again. 06:25 Jeff: Attempted to follow video tutorial from Aleksander Haber video. (That Bob had posted to Slack.) Failure/success. 10:15 Al: Asks about compiler versions. (while we are waiting to Arduino to load) 12:30 Arduino has loaded... Downgrading and patching. 14:45 Jeff: Be careful, because it offers to "help you" with new "updates". 16:45 Jeff: It works. And a recap of what worked. 18:25 Jeff: A few more obscure comments on installing. 21:50 Jeff: Again asks what is Micro-ROS and how would you use it. 22:45 Al: Mentions compiling Micro-ROS with Docker and made it work. Shows some details on compiling Micro-ROS with PlatformIO. 28:10 Al: Talks about NavSpark GNSS boards. Also talks about dead reckoning. Al shows the video. 39:30 Jeff: Mentions that the robot_localization nodes may give similar results.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Home Brew Robotics January monthly meeting has been posted: https://www.youtube.com/watch?v=erO2XZe8TY0
I found all 3 presentations interesting. I scanned through to get the starting times. The beginning of the video has a business meeting and show-and-tell.
@34:00 (15 minutes) Abstract: LiDAR Sensor Aided Navigation Smart white cane light, our sensors, and navigation for the blind on a two-wheel scooter
@50:00 (15 minutes) Abstract: Robot navigation via sending photos to a large language model AI.
@1:08:20 (30 minutes) Abstract: I plan to advocate ROS2 as the "easiest way to program robots" and offer a template for the least painful way to start learning ROS2.

*Thread Reply:* > @JeffS thanks for the heads up. It seems like there’s two developmental roads competing with each other? One road is the AI method. The other method is the Ros2 control framework. What are other peoples’ thoughts on those two methods ,,,,,AI versus control framework?
*Thread Reply:* @Bob Hassett I wasn't paying close attention when I watched this live. But I didn't get the impression that he had a robot actually navigating using any form of "AI".
So I went back and watched it again. I don't think ROS** (to include ROS1 and ROS2) have anything to worry about. Maybe you could use ChatGPT as a sensor into serious control software. But we will have to watch next month to see if his robot can do actual "intelligent" things.
https://en.wikipedia.org/wiki/ChatGPT I’m wondering how ChatGPT INTERFACES to Arduino or a Rpi? Another question is how to make it autonomous for a lawn mower? There was a security breach at one point. Sooo …. how secure will it be?
The Home Brew Robotics Club ROS meeting is tonight if anyone is interested. That is 7PM Pacific, 9PM Central, 10PM Eastern. https://groups.google.com/g/hbrobotics/c/gdKL2iUOdkY
*Thread Reply:* I joined the call for a little bit until Zoom died, maybe because of slow internet on my part, but they (Michael Wemby sic?, and Camp) were discussing Lino Robot and Micro ROS. https://github.com/linorobot/linorobot2_hardware fyi @JeffS
*Thread Reply:* I intended to attend the HBRC meeting. But I forgot. I remembered about 1-1/2 hours afterwards.
As far as I know HBRC only posts the Monthly meeting on Wednesday nights. The Tuesday night meeting was probably never recorded.
Info from today's video meeting.
====== 20250206 ROS Lawn Tractor Automation meeting - Length 37:41 This video: https://youtu.be/8WylR5YuZ6o
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks
Index: 00:00 Jeff: Points out links to meeting video index in description below. 01:25 Jeff: Talks about people switching to ROS2 on Raspberry Pi. 01:55 Jeff: The problem of which board, which OS version, which ROS version. They all have to match. 04:15 Jeff: The Docker container path. 05:30 Jeff: Docker vs. virtual machine. 06:00 Jeff: A laptop with Ubuntu 20.04, ROS1 Noetic, ROS2 Foxy. 06:45 Jeff: Run ROS1, or run ROS2, or run them both at the same time. (ros1_bridge) 08:25 Jeff: Or connect two computers together. 09:45 Jeff: OS support always "catching up" with next version of Raspberry Pi. 16:30 Jeff: Summarizes "Version Hell". 17:40 Al: Comments on "Version Hell". 18:20 Al: Talks about his Raspberry PI 5. 18:40 Jeff: Asks if Al has tried his external battery to power his RPi5. 21:10 Comments about attending/missing the HBRC meetings. 23:50 Jeff: Asks about availability of drivers for ROS2. 28:30 Al: Shows a "dead reckoning" GPS receiver he ordered. (uBlox EVK-M9DR) Also see last week's meeting. 31:45 Al: Talks about a computer vision experiment to monitor farm status. 36:10 Al: Mentions his linear actuator to control his hydrostatic transmission.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

This is just crazy! It takes me months to make anything. Because I have to agonize over every little detail. https://www.youtube.com/watch?v=s2LUfYi-JC0

@Al Jones I found a video for a cheap foam core airplane. He then pointed to a video to make the cheap remote control. https://www.youtube.com/watch?v=BKnxkAgBggM https://www.youtube.com/watch?v=3PUtnGxgTwI That turns up lots of variations of the same type of thing, https://www.youtube.com/watch?v=47eBRwFQp-g https://www.youtube.com/watch?v=LRP62cfE2wo https://www.youtube.com/watch?v=eadkW_cUP_I https://www.youtube.com/watch?v=5BfRg9CUMYI





Looking at the U-Blox 'dead reckoning' GPS unit I realized it is not an RTK unit, that is, it does not have the ability to ingest RTCM correction data, so I'm back looking at my SkyTraQ (Navspark) units. I have the PX1125R as a base and PX1172RDP as the rover. The PX1172RDP both accepts RTCM correction data and also wheel tick data for dead reckoning, My 3DR radios did not work immediately so I double checked the correction data was passing OK and the rover was achieving RTK Fixed. The test script is here.

*Thread Reply:* Just posting here so I hopefully remember to cover it at the weekly meeting. My 3DR radio's were not connecting with each other until I put my laptop in airplane mode. Too much interference is my guess. I still need to test with the gnss units, but this will be my configuration for testing.


So first glance at your Miro board, It looks like PX1125R is L1/L5 and the PX1172RDP is L1/L2. I assume your ComNav base station puts out L1/L2.
Didn't you only blow up one of your ComNav receivers? If so, you have an extra you can use to set up an L1/L2 base station.
*Thread Reply:* It's been a while, but I'm pretty sure I did test that successfully since I have a hookup diagram in my notes.

This might be interesting. I’d like to see the math be hind this. Do they use different channels, frequencies? How about same frequency but different beacon call signs/IDs?
https://apple.news/Aiogf1epWQgaJqoUKUWIRZg

Our weekly video meeting will be Friday instead of Thursday. So, Feb 14th, Noon Eastern time (11:00am Central). https://us02web.zoom.us/j/82088036016?pwd=K2lLc1FiWm9MU0dzRStxM2J2b3dpQT09
@Bob Hassett Here is another GPS alternative. "The end of GPS (Part 1) - Quantum Navigation" https://www.youtube.com/watch?v=oSiLRadzYhE
We will probably need more wars to develop the concept quicker? :-((
I seem to be having a new problem with the Ubuntu 24.04 clip board. Copy and paste work , IF , I select the copy icon on the line I want.
BUT if I just highlight the command and press control shift c, an additional screen pops up. A scripting screen. When I attempt to to paste with control shift v then it pastes the previous copy instead.
I’m thinking I have to reinstall ubuntu or is there an easy fix? Pics coming in next message.
*Thread Reply:* @Bob Hassett when trying to copy something from inside the terminal window I highlight and then right click and select copy. As you said, ctrl C does not work in a terminal window.
*Thread Reply:* Thanks for the tip I’ll remember that. Another issue I’m having is trying to copy text that is posted in tutorials. I can type that text in by hand and it works in the terminal. But if I use my mouse pad to highlight that text in the tutorial and then do control shift c, it doesn’t make it into the clip board. I can’t just highlight and copy commands listed by the tutorial.


So what does it do if you just use ctrl + c and ctrl + v (without shift). I have never used ctrl + shift + c or ctrl + shift + v. Random searching indicates it may be a carry over from Windows. Maybe ctrl + shift + c works in a Linux terminal. But there I right click to get the context menu and pick copy or paste.
People are suggesting that ctrl + shift + c gets intercepted (by browser?) and means something different than ctrl + c.
Nothing happens when I do ctrl c nor ctrl v
Ctrl shift c doesn’t copy, ctrl shift v just pastes the last thing on the clip board not my new selection.
I’m using a touch pad…. When I do a right click on the pad nothing comes up.
I think I’m just going to reinstall.
@Bob Hassett Are you running Fire Fox as your browser? That is the default browser for Ubuntu 24.04.
You can verify it by clicking the 3 bars in the upper right hand corner of page. Then click on Help. If it says "Help for Fire Fox" then you are running Firefox. Or click one more time and it tells you what version of Fire Fox you are running.
So, assuming you are running Fire Fox, then this page says Ctrl + Shift + C brings up the page Inspector. Which is exactly what you told it to do. https://support.mozilla.org/en-US/kb/keyboard-shortcuts-perform-firefox-tasks-quickly Search for "inspector" on this page to see it. Search for "Copy" on this p[age to see that it is Ctrl + C.
So selecting text (by dragging with the mouse) and doing a Ctrl + C will copy the text to the clip board. Pressing Ctrl + Shift + C will bring up the "Inspector", which it dutifully did. (and not not copy the text)
Keep in mind that every program you run will act differently. I will apologize for this non-sense. Bu that is the way it works.
To practice, open an editor (which by default may be gedit or whatever the editor someone preferred the day they released this distribution). Practice with selecting text, copying, pasting. When you get that mastered, go to your browser and attempt to copy text. Then go to the editor and paste it. See if that works. That tells you what was in your clip board. Which was copied from the browser. Either selecting text by dragging and doing Ctrl + C (or selecting by dragging and right clicking and clicking copy) or just clicking "Copy" icon (which isn't a standard way of doing things)
If you can master that. then you can move on to pasting into a Linux terminal window. You have mastered copying from a random window and pasting into an editor. Now try pasting into a terminal window. I usually just do a right click and select paste. That works for me. Doing a Ctrl + V does not work in the terminal. Because Linux interprets Ctrl + V to mean something special. But I just tried Ctrl + Shift + v and that does work.
So to summarize. Each program works differently (sadly). You have to know what works in each program (sadly). But that is just the way it is.
I always use right-click and select copy or cut or paste. Which seem to work everywhere. I don't know why your right-click doesn't bring up anything, maybe you haven't selected anything or maybe it is a configuration problem.
But reinstalling you operating isn't going to do anything other than waste your time. When you are all done, it will do exactly the same thing (because you are asking it to that.)
So go practice with the editor until you know exactly what it is going to do...


Info from today's video meeting.
====== 20250214 ROS Lawn Tractor Automation meeting - Length 29:55 This video: https://youtu.be/4m6owe4QKxg
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
Short cut keys. Mozilla/Firefox https://support.mozilla.org/en-US/kb/keyboard-shortcuts-perform-firefox-tasks-quickly Linux terminal/bash https://linuxsimply.com/linux-bash-terminal-keyboard-shortcuts/ gedit/gnome https://help.gnome.org/users/gedit/stable/gedit-shortcut-keys.html.en Home Brew Robotics Club mailing list. https://groups.google.com/g/hbrobotics You can subscribe to that and select digest mode. Thomas Messerschmidt FemBots https://www.youtube.com/@Robots-and-androids
Index: 00:00 Jeff: Points out links to meeting video index in description below. 01:30 Al: Talks about "Dead Reckoning" GPS receivers. uBlox EVK-M9DR and SkyTraQ (Navspark) PX1172RDP 03:15 Al: Back to using SkyTraQ. And test method. https://gist.github.com/jones2126/com6tocom10.py 04:10 Al: Using 3DR radios for correction data. Notes on baud rates. 08:35 Discussion of "Air Plane Mode" vs. WiFi and Bluetooth on Ubuntu Linux. 10:20 We discuss the copy/paste issues In Ubuntu that Bob was posting about. 26:30 Al: Asks about Home Brew Robotics Club ROS meeting schedules. 27:50 Mention of the HBRC AI group. (maybe Thursday nights?) Thomas Messerschmidt
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Just finished watching this weeks recording. @JeffS you described my copy/paste issues perfectly! Very good explanation!
Didn’t have a clue about “inspector”. Now I gotta learn more about that!
Anyway I think I’ll bypass my touchpad issues and just buy a wired mouse. That way I can parallel you guys
So Jeff your moving? I feel you pain. We are moving for the last time in 4 weeks. Letting go of electronic stuff is like pulling teeth!!.
*Thread Reply:* Found a cheap wireless mouse at Menards. Now I understand @JeffS what you were telling me about mouse actions. So much nicer with pop up actions.
*Thread Reply:* Well if your mouse buttons don't work on your touch pad then you have something to track down. I looked under Settings|Mouse&Touchpad. It doesn't have any settings for turning the buttons on or off. But this search may give a clue to fix the buttons:
<https://duckduckgo.com/?t=ffab&q=lenovo+touchpad+buttons+enable&ia=web>

Have not tried this yet maybe later https://help.ubuntu.com/community/Klipper#:~:text=to%20application%20|https://help.ubuntu.com/community/Klipper#:~:text=to%20application%20
*Thread Reply:* I guess one has to decide https://www.geeksforgeeks.org/kde-vs-gnome/


Just bought a new electric snowblower. I can’t modify it for atleast six months. :-(( Going to take all that time anyway trying figure out the hacks that will be needed.
https://miro.com/app/board/o9JkzvV0Pw=/?sharelink_id=801500728803


Info from today's video meeting.
====== 20250220 ROS Lawn Tractor Automation meeting - Length 12:36 This video: https://youtu.be/_ba9NMdJRak
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:30 Al: Quick update on his SkytraQ (Navspark) PX1172RDP "Dead Reckoning" GPS receiver. 25 Hz update rate. Works better with L1/L2 corrections as opposed to L1/L5. 03:00 Al: Video about frame modifications. https://tractorautomation.slack.com/archives/C8X6X6H7D/p1740066091248449 Linear actuator for hydrostatic transmission control. More random discussion about mounting things. 10:40 Al: Revisiting a kill switch for the engine.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

https://openroboticplatform.com/designrules https://github.com/SIGRobotics-UIUC/LeKiwi
Posting to look at later
I got a couple of messages from Minnesota DOT. They say they are upgrading their corrections data. The new version will provide GPS (USA), GLONASS (Russia), Galileo (Europe), and BeiDou (China) satellites. And they will provide L1, L2, L5 data. So it is good to see they are keeping up with technology... https://content.govdelivery.com/accounts/MNDOT/bulletins/3d3904c
First attempt at using OnShape for designing and laying out my flat bar pieces to hold various electronic components and I have measurements to give my metal fabricator. View Only Link: https://cad.onshape.com/documents/950c6a38b11772edc3c3e657/w/da7af5b45a56c817cf16e3b0/e/defcfd75713c7acac20db1fd?renderMode=0&uiState=67bf572bdc26402a1721a736|https://cad.onshape.com/documents/950c6a38b11772edc3c3e657/w/da7af5b45a56c817cf16e3b[…]13c7acac20db1fd?renderMode=0&uiState=67bf572bdc26402a1721a736



Info from today's video meeting.
====== 20250227 ROS Lawn Tractor Automation meeting - Length 25:15 This video: https://youtu.be/T6RBbiGSrCs
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
Al: PCB Cad system. https://easyeda.com/ AL: Al's CAD project. https://cad.onshape.com/documents/950c6a38b11772edc3c3e657/w/da7af5b45a56c817cf16e3b[…]13c7acac20db1fd?renderMode=0&uiState=67bf572bdc26402a1721a736
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:50 Terry: Talks about OnShape 3D CAD for his "snow thrower" he is designing. 02:50 Terry: Custom designed encoder wheel/sensor to detect impeller rotation. 03:20 Al: Asks about "tabs". Discussion of tabs and subfolders in OnShape. 04:05 More discussion of OnShape terms, definitions, and concepts. 08:10 Jeff: Mentions I/R transparent plastic. 10:30 Designing PC boards with OnShape? 14:25 Terry: Talks about problems with high humidity 3D filament. Stringing vs. flaking. 17:45 Al: Asks if OnShape will create an STL file. 19:15 Al: Talks about his mounting brackets for version 3 lawn tractor. 20:25 Al: Is learning OnShape to do his modeling.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

This month's HBRC meeting has been posted. https://www.youtube.com/watch?v=nB2lr-J9ewU ```Last night was quite a meeting featuring Mike Overstreet... humanoid expert. The video is up and the Chat is in the comments. Thanks to those who participated and especially those who help setup at Maker Nexus. Mike's presentation starts at 28 minutes in.
HomeBrew Robotics Club Meeting - February 26: Humanoid Robots by Michael Overstreet https://youtu.be/nB2lr-J9ewU?si=KS-gRMR-0FYPGABu
Enjoy, Camp```

Back to using Fusion 360 for design work. Seems the free version of OnShape has some sheet metal features, but the free version does not allow for creating a flat sheet DXF file which is what I want to send to my guy with a plasma cutter and metal bender.



Getting closer to plasma cutting the parts. After a little back and forth with the fabricator on millimeter vs. inch unit of measure and how the bend lines would be represented, the parts are now laid out in the plasma cutter software.

