
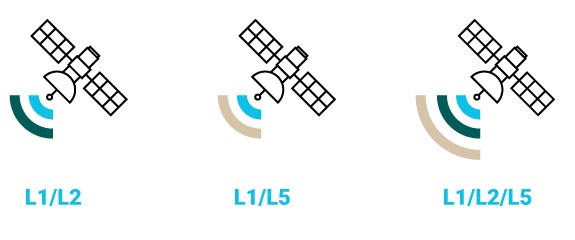
I just got an announcement from ArduSimple. They will have what they are calling "All-Band" receiver from uBlox. I haven't looked into it. They have articles on their blog/news page: https://www.ardusimple.com/blog/ Specifically: https://www.ardusimple.com/allband-vs-quadband-vs-tripleband-the-real-difference/ https://www.ardusimple.com/comparison-of-u-blox-zed-f9p-and-x20p/ https://www.ardusimple.com/new-product-simplertk4-optimum-with-u-blox-zed-x20p/

Info from this week's video meeting.
====== 20250306 ROS Lawn Tractor Automation meeting - Length 20:04 This video: https://youtu.be/9a4uGXCM6gI
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
ItsyBitsy boards: https://www.adafruit.com/search?q=itsy
Index: 00:00 Jeff: Points out links to meeting video index in description below. 00:45 Terry: Talks about his 3D CAD design for his quadrature encoder. 06:00 Terry: Other things to add. ItsyBitsy microcontroller, motor control board, addressable LEDs for status. 08:35 Al: Talks about his 3D CAD work. He is planning to have his parts fabricated on a plasma cutter. 17:40 Al: Suggests that somebody back up our Slack channel before the 90 day cutoff. Jeff plays with the Slack download.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt


Trying to round up my parts to get my new radio controller assembled....

*Thread Reply:* Parts list https://1drv.ms/x/s!AlSRhxzgYnAlk55diWpbH-4WOP16Q?e=wfdTpq|link
btw, the PCB in the photo has been updated. I moved and changed the size of the 'kill' pushbutton, rotated the pot's 180 degrees to align the low and high voltage positions and made the spacing for the led pin holes larger. New board will be DHL'ed next week, $55 for 5 pieces.



*Thread Reply:* For reference, when the Concentric burns up... 🙂 https://www.progressiveautomations.com/products/mini-linear-actuator?variant=18277278548035

Really nicely done Fusion 360 YouTube video on designing tires. The author shows how to use parameters so you can customize the size. I took a stab at a tire that matches my Cub Cadet. There are still some adjustments needed, but I was going for the basic shape. My assumption is using On Shape the steps would be very similar. Now I will have to see if I can put a rim and axle in it! https://www.youtube.com/watch?v=EbPbMoG6ltY




I finally remembered to finish the latest Slack backup chunk. You can find the main directories here if you are curious. The numbered directories represent each time period. If go go into any of those directories, then execute any html file and it should open that backup chunk.
http://sampson-jeff.com/RosAgriculture/slack_exports/
To make it quick, here are the links to the 3 "random" backups:
Something else interesting from HBRC. https://groups.google.com/g/hbrobotics/c/FUKkd3EvgKI
I see Weekly Robotics is back: https://www.weeklyrobotics.com/weekly-robotics-303
I am making progress modelling a tire rim, albeit in a clunky manner, but hoping to combine the tire and rim today.
For future reference, this guy had a very helpful video: https://www.youtube.com/watch?v=2-MjfWE8mmY



 }
}
Info from today's video meeting.
====== 20250313 ROS Lawn Tractor Automation meeting - Length 28:25 This video: https://youtu.be/W_cU9aNxIB4
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
The links for the Slack backups: Main directory: http://sampson-jeff.com/RosAgriculture/slack_exports/ Direct links: http://sampson-jeff.com/RosAgriculture/slack_exports/20180123-20240403/Slack%20Export%20-%20%23random.html http://sampson-jeff.com/RosAgriculture/slack_exports/20240402-20241212/Slack%20Export%20-%20%23random.html http://sampson-jeff.com/RosAgriculture/slack_exports/20241211-20250306/Slack%20Export%20-%20%23random.html Al's parts list link: https://1drv.ms/x/s!AlSRhxzgYnAlk55diWpbH-4WO_P16Q?e=wfdTpq Links mentioned for ArduSimple Blog/News articles: Main blog index: https://www.ardusimple.com/blog/ Specifically: https://www.ardusimple.com/allband-vs-quadband-vs-tripleband-the-real-difference/ https://www.ardusimple.com/comparison-of-u-blox-zed-f9p-and-x20p/ https://www.ardusimple.com/new-product-simplertk4-optimum-with-u-blox-zed-x20p/ Random links for "apriltags": https://wiki.ros.org/apriltag_ros https://wiki.ros.org/apriltag_ros/Tutorials https://automaticaddison.com/autonomous-docking-with-apriltags-using-nav2-ros-2-jazzy/ https://www.youtube.com/watch?v=Y8WEGGbLWlA
Index: 00:00 Jeff: (Forgets to mention the links below the video.) Mentions he is about to start moving to a new home. 00:40 Jeff: Talks about the third Slack backup chunk. So we have back to the start of this groups Slack channel (2021?). See the links in the Chat/Notes section above. 04:20 Al: Talks about version 2 of his remote control. 06:50 Jeff: Has suggestions on the usage of the speed control pot. 08:25 Al: Says he has a switch to solve that problem. 11:00 Some discussion about how the E-Stop button works. Does it it latch the stop request? Or is it momentary? 15:20 Al: Fusion 360 CAD designs and summary of his new plasma cut frame brackets. 17:30 Al: Has figured out how model a tire in Fusion 360. He also figured out how to add a rim to his tires. 20:35 Jeff: Mentions an announcement from Ardusimple. New uBlox TripleBand/MultiBand/AllBand receiver. Blog posts that explain that. (See links in Chats/Notes above) 21:50 Al: Talks about "april tags" that Terry mentioned last time. 22:25 Jeff: Found the references to Ardusimple and presents that. 27:50 Jeff: Bailed on HBRC "anything ROS" meeting.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Thinking through a new odom/rotation sensor for my rear axle for left and right odom movement. Thinking I will ask my plasma guy to cut an 8" disk with simple slots in an attempt to get the highest resolution. Thinking I will 3D print a flange mount shaft coupler. I seem to recall @TERRY SCHUMACHER has a shaft coupler with his opto sensor also.



Another video on powering Raspberry Pi from batteries. He says it is for Pi0 through Pi4. So you don't get his opinion on Pi5. I didn't watch it yet, I'm busy... https://www.youtube.com/watch?v=lPyDtuzYE5s

Update: I let that video "Raspberry Pi Battery Power" run while I was digging for other things. I see he presents some interesting things. One thing he does is demonstrate a way to log power usage over time so you can get a baseline to compare to.




Info from today's video meeting.
====== 20250320 ROS Lawn Tractor Automation meeting - Length 25:32 This video: https://youtu.be/pwV6zOI2-n0
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
Index: 00:00 Jeff: Points out links to meeting video index in description below. Jeff is moving out in about a week and a half. 00:40 Terry: Shows his CAD models. He is a adding a cover over his quadrature encoder. 05:15 Discussion of various types of 3D printing filaments. 08:15 Terry: Explaining more details. 09:30 Al: Talks about his custom plasma cut parts. 14:50 Al: Mentions his radio control PCB, and actuator placement. 15:20 Al: Mentions creating tires in 3D CAD. 15:30 Al: Talks about a custom cut disk with an induction sensor. 17:45 Jeff: Questions the shaft diameter. 18:15 The induction (proximity) sensor that Al wants to use. 19:35 Al: Asks about Jeff's new Internet provider. 20:50 We look at some motors. 22:25 Al: Asks about mounting the shaft encoder disk. Brass inserts for 3D printed parts.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Photos to discuss today. Getting my battery mounted and focused on mounting Teensy and controller for the linear actuator.




We have blinky lights using @Bob Hassett 's Drok buck converter to go from 12 volts to 5 volts, 5 amps for the RPi5.

Info from this weeks video meeting.
[Go here to get the description this meeting: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250327]
====== 20250327 ROS Lawn Tractor Automation meeting - Length 18:16 This video: https://youtu.be/BKNIHPWqHKw

Came up on my YouTube feed: Electrifying Heavy Machinery at RISE Robotics!

I was not expecting this....seems trying to remote into my RPi 5 that I will use on my tractor, headless and using the GUI via NoMachine is a problem. Instead of using the default Ubuntu GUI (gnome), I had to switch to the combination of XFCE + LightDM. For reference the steps were:
• sudo apt update
• sudo apt upgrade
• sudo apt install xfce4 lightdm # Choose lightdm as the default display manager
• sudo nano /etc/lightdm/lightdm.conf
[Seat:**]
autologin-user=your_username
autologin-user-timeout=0
user-session=xfce
• sudo nano /usr/local/bin/set-virtual-resolution.sh ``` #!/bin/bash
export DISPLAY=:0
Wait for X to be available
for i in {1..30}; do if xrandr >/dev/null 2>&1; then break fi sleep 1 done
Skip if a real monitor is connected
if xrandr | grep -q "HDMI-1 connected"; then exit 0 elif xrandr | grep -q "HDMI-2 connected"; then exit 0 fi
Set a virtual resolution (adjust if you prefer a different one)
if ! xrandr | grep -q "1280x72060.00"; then xrandr --newmode "1280x72060.00" 74.50 1280 1344 1472 1664 720 723 728 748 -hsync +vsync fi
xrandr --addmode HDMI-1 "1280x72060.00"
xrandr --output HDMI-1 --mode "1280x72060.00"
• sudo chmod +x /usr/local/bin/set-virtual-resolution.sh
• sudo nano /etc/systemd/system/virtual-display.service
[Unit]
Description=Set virtual display resolution for headless use
After=graphical.target
[Service] Type=oneshot ExecStart=/usr/local/bin/set-virtual-resolution.sh User=your_username Environment=DISPLAY=:0 RemainAfterExit=true
[Install] WantedBy=graphical.target``` • sudo systemctl daemon-reload • sudo systemctl enable virtual-display.service I may grow to like the more Windows-like GUI.

Way back in 2020 I bought this camera (link), but only now connected this OAK-1 camera to my RPi 5, thinking I will mess around with AprilTags that @TERRY SCHUMACHER mentioned. At the moment, I just have it pushing a web display and tested being able to adjust it via the web interface. The code is here (link) which is a new repo for me.



Finally got internet at the new house just in time to see Al’s use of Apriltags! Very interesting. I’m wondering if Apriltags could be used for triangulating position of a robot?
*Thread Reply:* @Al Jones thank you for the heads up on Apriltags.! Maybe a good starting point to learn about Apriltags and navigation?:
Can you hear me now? Can you hear me,,, Now? I also have new Internet installed. Another long story...
https://www.instructables.com/Navigation-Using-Apriltag-and-Raspberry-Pi-In-Prog/

fun to watch.... https://www.youtube.com/watch?v=3BIMFqizDWY

I think I have worked out my pin assignments on connecting my GNSS GPS to my RPi 3 for my base station:

Info from last weeks video meeting.
[Go here to get the description this meeting: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250410]
====== 20250410 ROS Lawn Tractor Automation meeting - Length 23:17 This video https://youtu.be/CmXdLjORstU

Info from this weeks video meeting.
[Go here to get the description this meeting: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250417]
====== 20250417 ROS Lawn Tractor Automation meeting - Length 41:22 This video https://youtu.be/64OlMghs5tw

Components for the solar powered base station: battery, RPi 3, solar charge controller, 12 volt to 5 volt converter and gnss gps receiver.

*Thread Reply:* Watched the latest videos and want to thank @JeffS for going the extra mile, literally. Looks like you’ve got some very interesting robot proving grounds. My maker space is on the second floor and the attached garage is very limited. So I’ll be very interested following your robot build logistics. Curious as you juggle disconnected work spaces.
A little more progress on my RTK base station. I have ZeroTier VPN running on the RPi 3 so I can log in remotely as long as it has wi-fi. I have figured out the python commands to configure the GPS unit, so I am currently configuring it without the OEM software and just using python. Figuring out the "\r" and "\n" at the end of writing the GPS command was a bit persnickety.
ser.write((command + "\r\n").encode('ascii'))
I have GPS, GLONASS, Galileo, and BeiDou RTCM binary messages configured at the moment and appear to be able to confirm that from my configuration script. Not quite sure if all that is appropriate or not. My code is here on GitHub. Now to push the corrections via a web socket and pick them up on the 'rover' to get RTK. Sounds simple, right! I also have to update the station ID and antennae record. I'm not sure how that is used in getting RTK; Plus add some type of 'location survey' function to capture say 24 hours of location data to update the 'fix position' command. So much to do....
On the solar side it appears the solar charge controller is reporting 300mA draw from the RPi and GPS. My 100 watt panel would likely put out enough to keep the unit running 24 hrs if I get a better (i.e. larger) battery. Not sure if that is important at the moment though. I'll just turn it off and on for now.
 <a href="https://github.com/jones2126/tractor2025">jones2126/tractor2025</a>
<a href="https://github.com/jones2126/tractor2025">jones2126/tractor2025</a>

Household stuff is moved in to the new house. Deciding what shop stuff to bring and what to sell off was like pulling teeth without novocaine. Slowly finding my electronic stuff. Still have to find a home for tools and such on the covered flat bed trailer. New Internet, streaming and WiFi is good enough.



Yes, it is the usual time and place. 11:00 AM Central https://us02web.zoom.us/j/82088036016?pwd=K2lLc1FiWm9MU0dzRStxM2J2b3dpQT09
Abandoned using ComNav K706 as base station to send RTCM correction data. Now I'm trying Navspark SkytraQ gps. I first ran the output at 2 Hz, but I seem to be getting network issues so I'm slowing down to 1 Hz. I did try RTK2GO.com for nearby correction data and that worked. The mountpoint/station is about 15 miles away. They appear to be at 1 Hz also.

Info from today's video meeting.
Go here to get the description this meeting: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250424]
====== 20250424 ROS Lawn Tractor Automation meeting - Length 29:39 This video: https://www.youtube.com/watch?v=U8wpksupKfY




I have RTK Fix achieved using RTK2GO and my local Base station. To get RTK2GO to work I struggled but finally got a script to log in to the mountpoint and push the corrections to my GPS. Code is here.
Info from today's video meeting.
[Go here to get the description this meeting: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250501 ]
====== 20250501 ROS Lawn Tractor Automation meeting - Length 55:19 This video: https://youtu.be/ZDlIuvUQhvo

Here is a marked up image of the modifications I was trying to explain at this weeks video.

Updated RTK Base station RPi 3 code link. Main functions include:
- Sending RTCM correction data to wi-fi web socket port (I use 6001 for no particular reason)
- Outputting a summary of which messages and their frequency to a log
- Checking for CRC errors reading the binary RTCM data and reporting their count. So far it has been ~0-2%.
- Managing the log file size and compressing and deleting over time to avoid the RPi from crashing due to disk space issues. Other changes for future improvements:
- Monitor the voltage of the 12-volt battery and report that somewhere. Miro Board https://miro.com/app/board/uXjVM1yzdFo=/?moveToWidget=3458764627321189508&cot=14|link


I did a simple test using 2 different antennas. Let's call one 'the black one from Navspark' and the other 'the white one from eBay'. I then noted the 2D RMS and the CEP 50% values for each after about 300 observations. The Navspark antenna, which was a more recent purchase, had slightly lower (i.e. better) values when using the same GNSS receiver. It is just a rough test, but I thought I would share the data.



Info from today's video meeting.
[Go here to get the description this meeting: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm#20250508]
====== 20250508 ROS Lawn Tractor Automation meeting - Length 32:50 This video: https://www.youtube.com/watch?v=QrDQa91t8DE

I'm going to try these connectors this time around.... Molex Mini-Fit Jr 4.2mm spacing.

Working on mounting components which makes me 3D printing standoffs. I have three heights, 7, 20 and 26 mm in order to allow for different space needs.

Previously I had issues printing duplicates at the same time, but I tried it when using Fusion 360 Manufacturing to slice the model and they came out nice 👍

Still sorting out placement. Added a 4 relay board and thinking about a high voltage connector for my e-stop.


Info from today's video meeting.
====== 20250515 ROS Lawn Tractor Automation meeting - Length 54:14 This video: https://youtu.be/wJmoLhIqRCc
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126 LimeLight camera: https://limelightvision.io/ If you have an Oak-D camera: https://duckduckgo.com/?q=oak-d+camera+apriltag+tags&t=ffab&atb=v343-1&ia=web "Cat Tracks" https://duckduckgo.com/?t=ffab&q=cat+track+wireway+cable+management&ia=web
Index: 00:00 Al: Quick introduction. Gives some updates. 00:20 Al's panel layout for second version of lawn tractor. 01:14 Slightly newer version of same panel. Has a big relay and 4-channel relay board. 03:55 Some discussion of the parts and functionality. 05:20 A newly received Molex connector kit. 05:55 Al has succeeded in printing multiple parts at once. Fusion360 slicer works better than what he used originally. 06:50 More discussion about the electronics panel. 10:40 Bob: Shows his electronics module. 14:35 Bob: Talks about AprilTags. 14:45 Bob: Talks about moving into his new house. 15:25 Terry: Gives updates. 16:10 Terry: Talks about his First Robotics team. 19:40 Terry: Talks about LIMELIGHT cameras. 30:00 Some discussion about OnShape CAD. More discussion about the First Robotics team. 44:00 Jeff: Mentions that Oak-D cameras appear to do AprilTags. 45:10 Jeff: Update on "moving in" progress. 47:50 Jeff: Asks if Al found out the length of the filament spools.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Spent an hour looking for my hdmi adapter and realized I have to stop development, find missing boxes AND more importantly get organized!

Ardusimple sent me a new email. It has a list of correction services: https://www.ardusimple.com/rtk-correction-services-in-your-country/
 }
}
My next step is to do a headless Rpi5 without using monitor or keyboard to get started. Any recommendations? Remmina? Tiger VNC? Others? I’ll need a gui.
*Thread Reply:* I use PuTTy to log in remotely when I just want a command line interface to my remote RPi. I also use FileZilla https://filezilla-project.org/ if I want to upload or download files. If I want a full GUI interface, I have tried all you listed and have found https://www.nomachine.com/ to be free and most reliable. I would start with PuTTy to make sure you have connectivity worked out.

Not much progress to report today. Only thing I recall getting done is working on a 3D print to hold a Molex connector.
Find a drawing was a bit of a chore. https://www.molex.com/content/dam/molex/molex-dot-com/products/automated/en-us/salesdrawingpdf/555/5559/039014046_sd.pdf?inline


Info from today's video meeting.
====== 20250522 ROS Lawn Tractor Automation meeting - Length 27:51 This video: https://youtu.be/K_2T0hi_4n4
Chat/Notes: Al's Miro board: https://miro.com/app/board/uXjVM1yzdFo=/ Al's github: https://github.com/jones2126/ Al's Jupyter Notebook directory. https://github.com/jones2126/ros1_lawn_tractor_ws/tree/master/project_notes/jupyter_notebooks Al's gist channel: https://gist.github.com/jones2126
ROSCON video archives: https://www.youtube.com/@gogogadgetflow2777/videos Search that brought up the videos in question: https://duckduckgo.com/?t=ffab&q=imu+navigation+dead+reckoning&ia=web Remote access GUI software: https://www.nomachine.com/
Index: 00:00 Jeff: Story of finding a hard drive and mention of description/links below video. 03:10 Jeff: Points out a YouTube channel with ROSCON archives. 10:00 Jeff: It is time to back-up the Slack channel again. 10:20 Jeff: Bought a BlueTooth bathroom scale. Another thing to try to reverse engineer it's BlueTooth protocol. 11:40 Jeff: Organizing; move tables around. 12:30 Al: The YouTube videos that were mentioned. 14:00 Al: Asks to click on a MatLab video. 17:10 Jeff: Mentions the original search that brought up all these interesting bits. 19:30 Al: Is 3D printing brackets for his new Molex connectors. 21:50 AL: Gives a list of software for remote access.
==
Link to access the Slack channel: https://tractorautomation.slack.com/
Lawn Tractor Automation YouTube page: https://www.youtube.com/@lawntractorautomation2726/videos
Index for Lawn Tractor Automation Zoom meetings: http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.htm http://sampson-jeff.com/RosAgriculture/LawnTractorMeetingNotes.txt
Index for the original ROS Agriculture Zoom meetings (~250 videos): http://sampson-jeff.com/RosAgriculture/readme.txt (Use following link, or newest file in that directory) http://sampson-jeff.com/RosAgriculture/ros-agriculture-youtube20230104.txt

Finally found my hdmi adapter, got the Rpi running with Bluetooth mouse and keyboard. I’ve downloaded NoMachine to my iPad and Rpi5.
So now I think I’m getting confused which machine is server and which is/are clients on their NoMachine Network. I also want to add my Ubuntu laptop. oh hell why not add my iPhone to the chaos as well!
I would like to see/ control the Rpi on my iPad and or Ubuntu laptop. OR phone.
Any advise?



Assume your RPi is the server and all other machines are clients accessing the server/RPi.